Chapter 3 Troubleshooting of Drone System
Foreword Overview
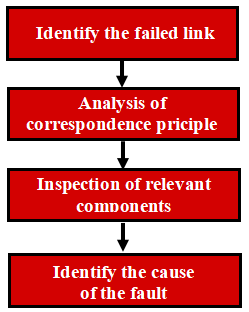
This chapter focuses on troubleshooting of common problems of 21/22/23 agricultural drones and their related mission systems. In this chapter, troubleshooting will be guided by fault symptoms, fault causes, troubleshooting steps and treatment methods. The troubleshooting flow chart will be used to assist in troubleshooting.
In the process of equipment maintenance, troubleshooting is a key link. It is necessary to comprehensively use various technical means such as fixture, disassembly and maintenance technology, test and acceptance. It is of great significance for improving maintenance efficiency and reducing cost to accurately analyze the fault and quickly locate the problem.
Accident analysis
Agricultural drone need troubleshooting when it goes wrong, which can be divided into the following three categories:
(1) As the flight log analysis shows, the fault of the agricultural drone is caused by human error, then the damaged parts can be visually determined.
(2) Determine the cause of the fault through the flight log analysis, and detect the specific fault module by the fixture, then to repair and replace.
(3) When its unable to determine the specific cause of the fault through the flight log analysis, test-replacement of the agricultural drone should be done, and then repair and replace.
Troubleshooting ideas
Develop troubleshooting ideas
Troubleshooting principles
• Check common problems first, and check rare problems in the back.
• From simple to difficult, from outside to inside.
• Principle of efficiency, draw inferences about other cases from one instance.
Principles for troubleshooting and replacement of parts
• Follow the replacement sequence of: from the fragile part to the hard part, from simple to difficult, from low value to high value.
• Follow the principle of replacing parts before modules. If the faulty module can be fixed by replacing the parts, replace the parts first.
• If the fault cannot be solved by replacing parts, consider replacing the module.
• When replacing the electronic module, it is necessary to confirm the damage through the fixture before replacing.
Type of fault
The type of fault of XAG 2023 agricultural drones are divided into Powertrain, Flight Control and Sensing System, RTK Positioning System, Electrical System, Communication System, RevoSpraying System, RevoCast System and RealTerra System. The corresponding system and fault type can be searched according to the form (click the corresponding page number in the form of the document to jump to the page) .
Faulty System | Type of fault | Page number |
No signal in ESC | ||
ESC offline | ||
ESC response abnormal | ||
Insufficient power of single motor | ||
Insufficient power of multiple motors | ||
Powertrain | Motor alarm | |
Body uneven | ||
Steering gear offline | ||
Steering gear initialization failed | ||
Steering gear calibration failed | ||
The steering gear swings | ||
Body vibration excessively |
high volatility | ||
4D imaging radar offline | ||
4D imaging radar mismeasurement | ||
Terrain Follow Radar offline | ||
Terrain Follow Radar mismeasurement | ||
Flight Control and Sensing System | Agricultural drone offline, flight control offline | |
The flight control cloud communication light: green light flashes slowly. | ||
Flight control cloud communication light: red light flash | ||
Agricultural drone sensor anomaly | ||
PSL pilot view image not displayed |
Bad satellite signal | ||
Excessive RTK delay | ||
RTK positioning system | Heading accuracy turns 25.5 ° or 0 ° | |
The remote control cannot enter mapping mode. |
Faulty System | Type of fault | Page number |
RevoCast System calibration failed | ||
RevoCast System Offline / Execution System identification error | ||
Abnormal Auger motor speed (current) | ||
Feedbox Sensor offline | ||
RevoCast System | Abnormal rotation speed (current) of throwing disc motor | |
Auger motor offline | ||
Throwing disc motor offline | ||
Remaining materials amount for the return voyage is not accurate | ||
Submodule mismatch |
Faulty System | Type of fault | Page number |
RTK positioning system | Agricultural Drone can not enter RTK or quit midway. |
Abnormal battery flashing light | ||
Battery plugs temperature is too high | ||
Smart Battery offline or midway disconnect | ||
Electrical System | The single battery cannot be turned on | |
Dual battery cannot be turned on | ||
Battery level is not displayed |
Add agricultural drone error "no device detected nearby" | ||
Remote control cannot be connected to the mobile phone | ||
Communication system | Remote control cannot bind the agricultural drone. | |
Remote control red light flashing, and cannot enter the green light. | ||
When the remote control is on, the third green light keeps flashing | ||
Operator network handover failed |
Spraying System calibration failed | ||
Spraying System offline | ||
Inaccurate flow and large error | ||
Unstable route spraying | ||
RevoSpraying System | medicine boxoffline | |
Abnormal nozzle motor speed (current) | ||
Abnormal pump motor speed (current) | ||
Nozzle motor offline | ||
Water pump motor offline | ||
Submodule mismatch |
Faulty System | Type of fault | Page number |
RealTerra camera abnormal | ||
When executing task, App mentioned by mistake that "the job mount agency was not detected" | ||
RealTerra algorithm abnormal | ||
High-precision image composition failed | ||
High-precision image blurring | ||
RealTerra System | Error "No point cloud link found" when viewing 3D high precision map | |
3D high-precision drawing operation error “Tiles amount empty” | ||
When route uploading, shows “Route uploading fail, route passing through empty hole” | ||
When task execution ends, the settlement results uploaded last too long (or stuck) | ||
Aerial survey error "Camera route mode query no response |
Powertrain
No signal in the ESC
Phenomenon description: when flight control connects with the wiring board, the control signal is sent to the ESC through the wiring board, and the ESC responds after receiving the control signal.When the ESC does not receive the control signal from the flight control, the breathing light state is blue breathing.
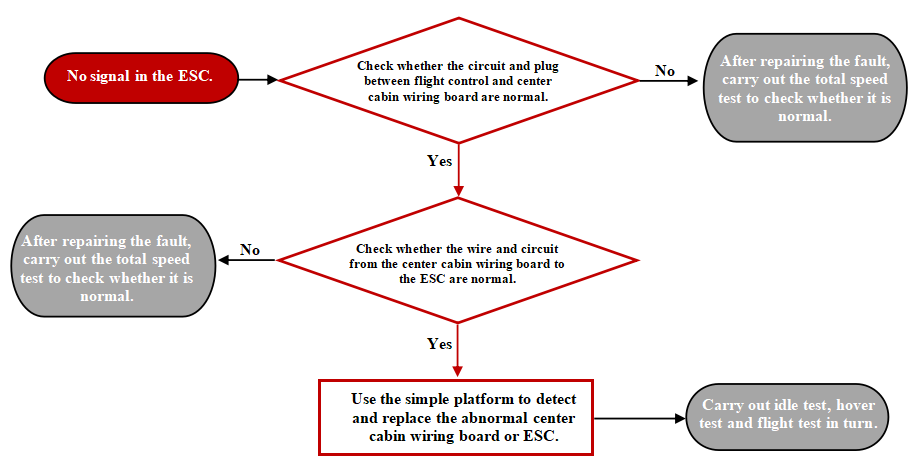
Cause analysis
(1) The circuit and plug between the flight control and the hub board are faulty.
(2) Circuit failure of ESC signal line, ESC or central cabin wiring board.
(3) If there is no signal for multiple ESCs, it is considered to be a flight control failure.
Investigation steps and handling methods
(1) Check the wire and plug between the flight control to the wiring board.
a. Whether the position of PLD and PTS is reversed.
b. Check the pinhead of the plug for deformation, looseness, lack, open circuit or short circuit.
(2) Check whether the central cabin wiring board and ESC in the central compartment are burned, or whether there is any feeding or circuit fault (with the help of a multimeter).
(3) Use a simple platform to test and replace the abnormal ESC or central cabin wiring board (if there is no signal for multiple ESCs, it is considered to be a flight control problem).
ESC offline
Phenomenon description: "XAG One" App reports an error that the ESC is offline or there is no ESC firmware in the current firmware list.
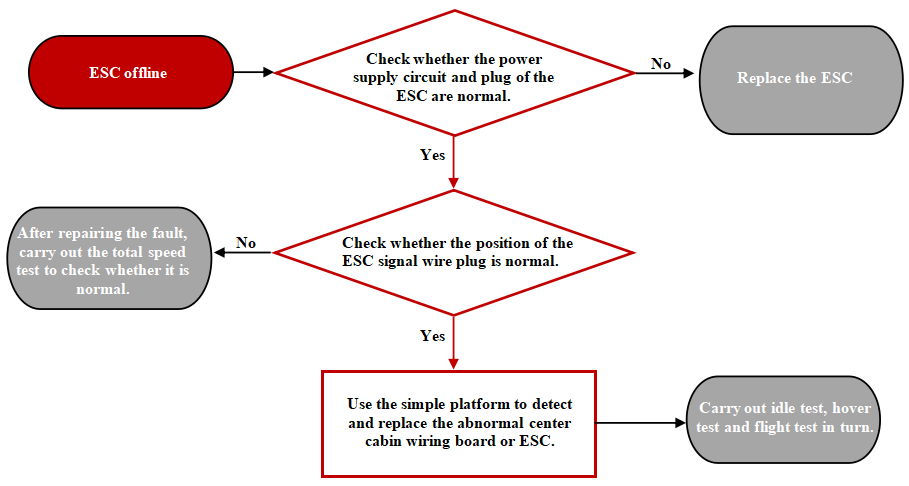
Cause analysis
(1) The plug of the ESC signal line is not plugged tightly or the plug is damaged.
(2) The power line of the ESC is broken.
(3) If the electric dimming lamp is on but the motor cannot be started, consider the motherboard problem.
Investigation steps and handling methods
(1) If a single ESC lamp is not on, check whether the power terminals of the ESC lamp and the central cabin wiring board are loose. If none of the four ESC lamps is on, there should be a problem with the central cabin wiring board, and then can be replaced to try again. Or check whether the power supply end of the battery tail plug is loose.
(2) If a single ESC blue light on and make a sound of dou-dou-dou, then check whether the plug of the ESC signal line is plugged tightly, whether the terminal pin is missing or deformed. If this happens to all four ESCs, check whether the PLD plug of the flight control and center cabin wiring board has the above problems.
(3) If the ESC lamp is normal but the motor cannot be started, use a simple platform to test and replace the abnormal ESC lamp or the central cabin wiring board.
Motor response is abnormal
Phenomenon description: when the ESC receives the control signal from the flight control, the direct current will be rotated to three-phase alternating current according to the control signal, then drive the motor so as to drive the propeller. After the motor rotates, the ESC will feed back the motor speed signal to the flight control through the wiring board. Under normal conditions, the rotating speed of the motor is proportional to the control signal received by the ESC. Abnormal motor response means that this proportional relationship is destroyed and the motor cannot reach its proper speed.
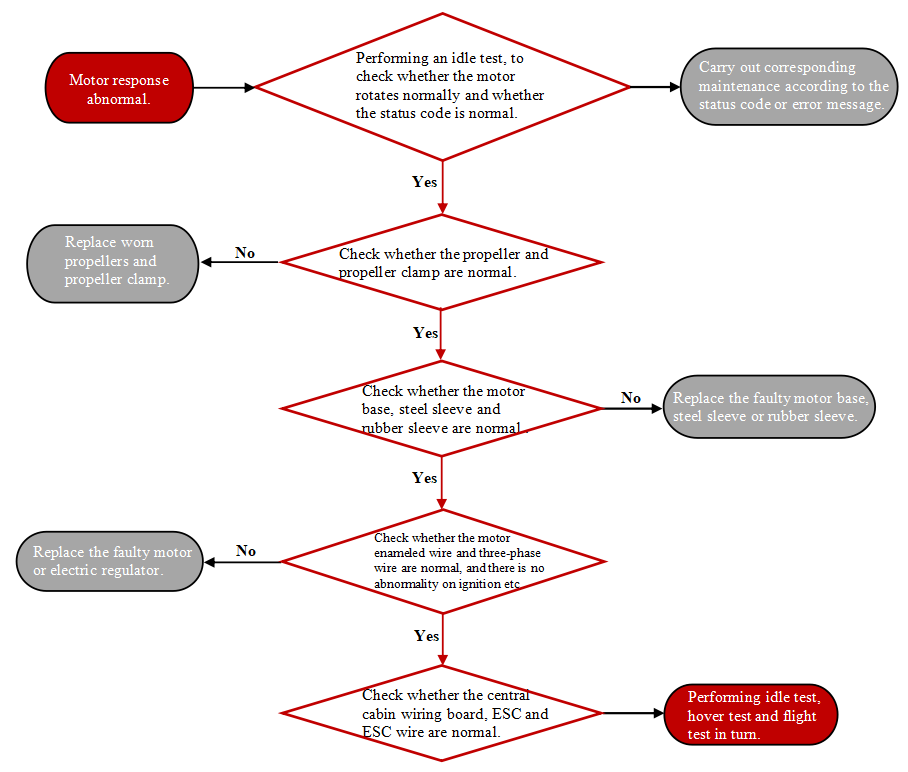
Cause analysis
(1) The propeller is damaged or broken, and the propeller clamp is loose.
(2) The fixation of motor base and motor is loose.
(3) Damping rubber sleeve is seriously worn, resulting in increased vibration.
(4) The motor enameled wire is broken and burnt.
(5) Stuck rotation caused by foreign matters inside the motor.
(6) The magnetic steel falls off.
(7) The connection between the motor and the three lines of the ESC is loose and burned by fire.
(8) Medicine intake or other faults on the main board of the ESC.
Investigation steps and handling methods
(1) If the agricultural drone can be powered on normally, conduct an idle test first to see if there is any problem.
(2) Check whether the propeller is cracked or damaged and whether the propeller clamp is loose.
(3) Check whether the motor base is well fixed without looseness and whether the steel sleeve is broken.
(4) Check the wear condition of the damping rubber sleeve and replace it with a new one.
(5) Gently rotate the motor by hand to check whether the motor is stuck.
(6) Check whether the enameled wire of the motor is burnt and blackened, and whether the root of the three-phase wire and the motor is broken.
(7) Check whether the terminal screw of the three-phase line of the motor is loose.
(8) Whether the contact surface of the three-phase line terminal is burned by ignition, resulting in poor contact.
(9) Check whether the mainboard is damaged due to the injection of the ESC.
Insufficient power of single motor
Phenomenon description: the flight control system sends a single ESC output control signal to operate at full power, and the motor responds normally to the corresponding speed. However, the lift generated by the propeller now is still unable to meet the requirement of the agricultural drone, resulting in the failure to maintain normal flight, causing a falling situation or even blow up the drone on the ground.
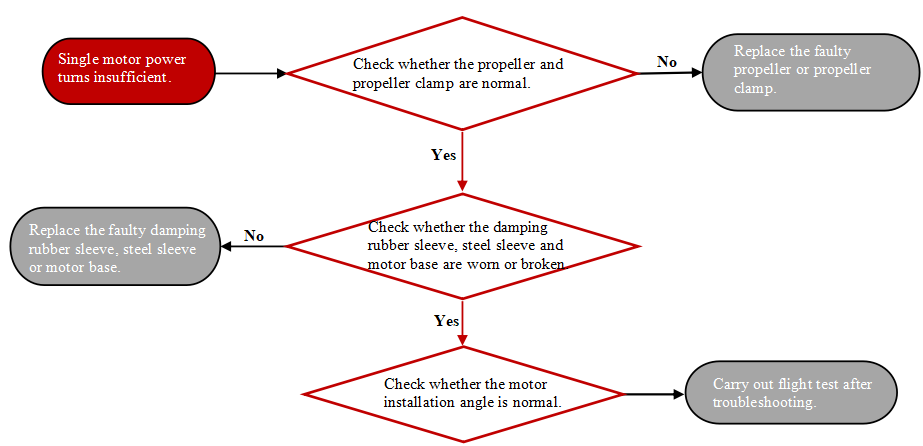
Cause analysis
(1) Problems with the propeller.
(2) The fixation of motor base and motor is loose.
(3) Deviation of motor installation angle.
Investigation steps and handling methods
(1) Check whether the propeller is deformed or cracked.
(2) Gently break the blade by hand to see whether it is soft and whether there are too many attachments on the blade surface.
(3) Check whether the damping rubber sleeve is worn and whether the motor base is loose.
(4) Check whether the motor installation angle meets factory standard.
Insufficient power of multiple motors
Phenomenon description: multiple ESC output control signals operate at full power and the motor responds normally. At this time, the agricultural drone can not maintain the flight state and drop down, or even touch the ground and blow up itself.
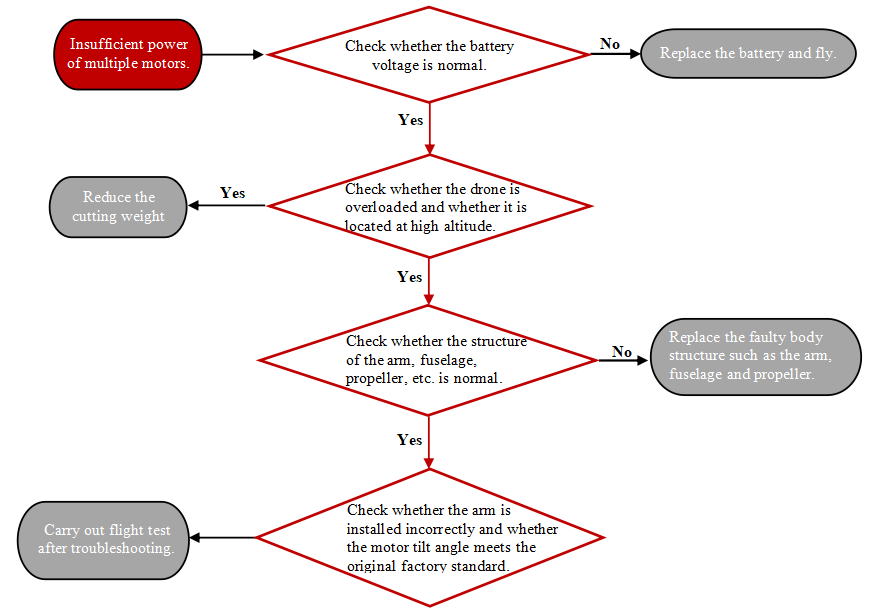
Cause analysis
(1) The battery voltage is too low to provide normal power.
(2) The takeoff weight seriously exceeds the rated maximum takeoff weight of agricultural drones.
(3) Agricultural drones fly at high altitudes area.
(4) The airframe structure of agricultural drone is deformed.
(5) Problems with the propeller.
(6) The installation of the machine arm is wrong, resulting in the deviation of the installation angle of the motor.
Investigation steps and handling methods
(1) Initially check whether App has battery alarm, and then check the flight log to see whether the battery voltage is normal (not less than 42V). Check the battery cell for bulging or other faults.
(2) Check the load weight of the agricultural drone to see if it is overweight.
(3) Check the flight log to confirm whether it is operating in a high altitude area. If it is, consider flying with reduced weight on the basis.
(4) Check whether the arm is installed incorrectly and whether the motor tilt angle meets the original standard.
(5) Check whether the body structure is deformed and whether the main frame and tail frame are broken or damaged.
(6) Check whether the propeller is the original model, whether the blade is soft, deformed, and whether there are too many attachments.
Motor alarm
Phenomenon description: when some faults occur in the powertrain, the motor buzzer will give an alarm and the blue light of the navigation light will flash.
Cause analysis
(1) The battery voltage is too low to provide normal power.
(2) The takeoff weight seriously exceeds the rated maximum takeoff weight of agricultural drones.
(3) Agricultural drones fly at high altitudes area.
(4) The airframe structure of agricultural drone is deformed.
(5) Problems with the propeller.
(6) The installation of the machine arm is wrong, resulting in the deviation of the motor installation angle.
Investigation steps and handling methods
The specific judgment and troubleshooting can be based on the sound of the buzzer:
(1) The alarm sound is dou-dou-dou single tone, with an interval of 1.5s. This is a communication link failure, which may be:
a. The PPM signal of flight control is not received, the throttle signal is not connected or the signal processing circuit has problems. Plug and unplug the ESC signal line again.
b. Alarm when the output signal is less than 40Hz or greater than 450Hz.
(2) The alarm tone is Xi Xi Xi with a tone interval of 0.4s:
a. The throttle is greater than the start signal within 2s when the ESC starts.
b. Short circuit or poor contact of the input and output terminals of the ESC.
(3) The alarm sound is rai-mi-rai-mi, and the interval between two tones is 1.2s:
a. Alarm after starting the propeller: voltage sampling or current sampling is abnormal, and the ESC needs to be replaced.
b. Alarm after power-on: the product type is wrong, and it is necessary to use the "Jijia Overhaul" App to configure the ESC.
(4) The alarm sound is mi-fa-sao-la-mi-fa-sao-la four-tone interval of 1.6s, and the reason is the motor locked-rotor alarm. The motor is stopped due to the collision of the propeller, and the ESC is used for protection.
(5) The interval of three tones of fa-sao-la-fa-sao-la is 1.6s. The reason is that the serial number of the motor is on conflict. Check whether the central cabin wiring board compartment is filled with medicine or has a fault.
The body is uneven
Phenomenon description: The four motors of the agricultural drone rotate to drive the propeller to generate lift. At the same time, the rotation of the propeller will give a moment (or torque) to the air. According to Newton's third theorem, there is a reaction (reverse torque) against the direction of the propeller. Therefore, the four motors of the agricultural drone should adopt the installation sequence of positive and negative rotation to make the reverse torque offset each other. To ensure the stability of agricultural drone flight, if the body is uneven, it will lead to changes in the size and direction of lift and torque forces., thus breaking the force balance of the whole flight system, affecting the flight state of the agricultural drone and even blowing up the aircraft.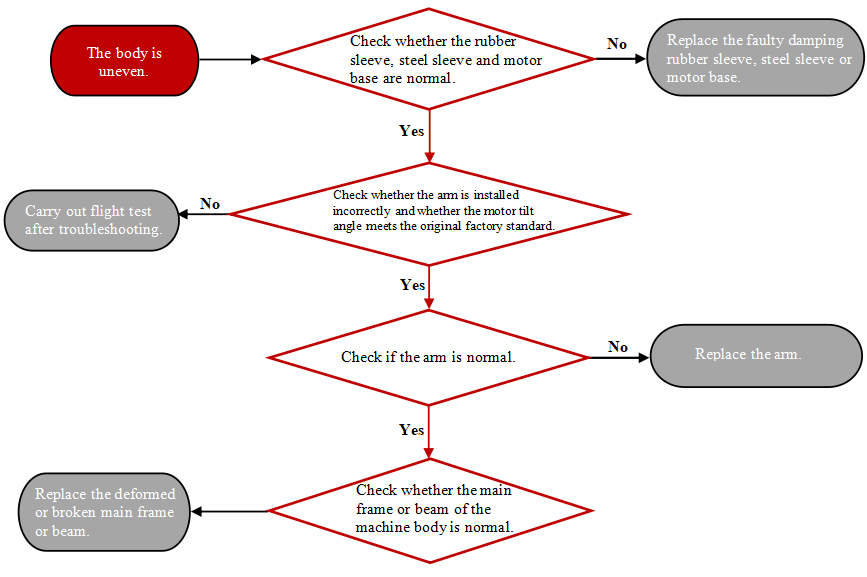
Cause analysis
(1) The screw of the arm pipe clamp is loose or the structure is deformed, and the rubber sleeve of the steel sleeve is broken.
(2) The motor base is different which causes the motor isn’t on the same horizontal plane.
(3) The mounting surface of the arm motor is not on the same plane.
(4) The main frame or the front and rear beams of the machine body are deformed.
Investigation steps and handling methods
(1) Check whether the screw of the pipe clamp at the connection between the machine body and the machine arm is loose, and whether the steel sleeve and rubber sleeve are broken or damaged.
(2) Check whether the motor base is deformed or not installed in place.
(3) Check whether the arm is deformed or cracked.
(4) Check the main frame of the machine body, and the front and rear beams for deformation.
The steering gear is offline
Phenomenon description: "XAG One" App reports that the steering gear is offline or there is no steering gear firmware in the current firmware list.
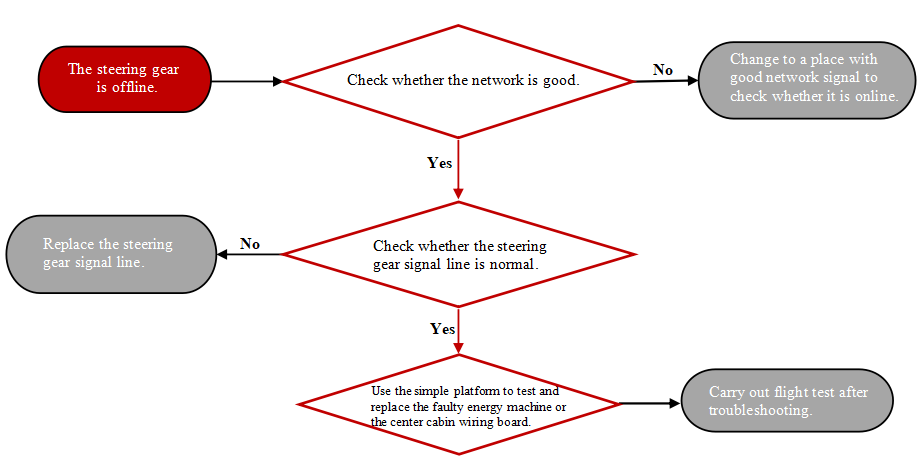
Cause analysis
(1) Network problem.
(2) The signal line is worn or broken.
(3) Steering gear failure.
Investigation steps and handling methods
(1) Check whether the network communication on the App side is poor. You can wait for a second or restart.
(2) Check whether there is open circuit, short circuit, poor connection, etc. between the steering gear signal line and the center cabin wiring board.
(3) Use a simple platform to test and replace the faulty steering gear or center cabin wiring board.
Steering gear initialization failed
Phenomenon description: The motor keeps horizontal, the steering gear cannot return to the center after startup, and the navigation blue light is breathing.
Cause analysis
(1) If the steering gear fails to pass the self-test, it may be caused by the steering gear offline or the steering gear calibration failure.
Investigation steps and handling methods
(1) Check with the steps of steering gear offline or steering gear calibration failure.
Steering gear calibration failed
Phenomenon description: "XAG One" App reports an error during steering gear calibration, and the steering gear calibration fails.
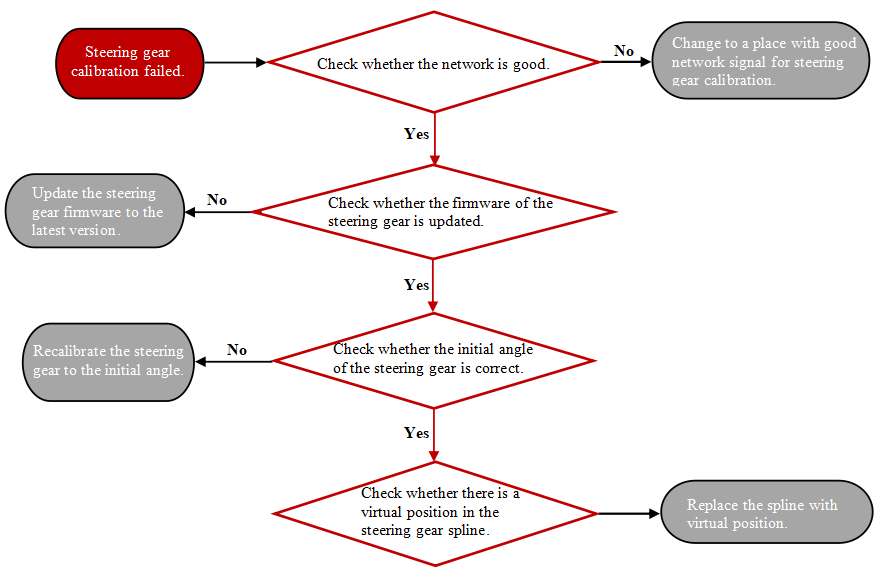
Cause analysis
(1) Network problem.
(2) Firmware of steering gear is not updated to the latest version.
(3) The initial angle of the steering gear is incorrect.
(4) The spline of the steering gear has a virtual position.
Investigation steps and handling methods
(1) Check whether the network communication on the App side is poor. You can wait for a second or restart.
(2) Ensure that the steering gear firmware has been upgraded to the latest version.
(3) Ensure that the initial angle is correct before the steering gear calibration.
(4) Check whether the spline of the steering gear has a virtual position.
The steering gear swings
Phenomenon description: V-series agricultural drones have obvious forward and backward swing or nodding phenomenon during flight, or when viewing flight data, the pitch angle fluctuates frequently and greatly.

Cause analysis
(1) The propeller is loose or abnormal.
(2) The motor is loose or abnormal.
(3) The steering gear and its structural parts are loose or abnormal.
(4) The gear inside the steering gear is jammed, missing or abnormal.
(5) The arm is loose or abnormal.
(6) The flight control is loose or abnormal.
Investigation steps and handling methods
(1) Check whether the propeller is damaged, deformed or loose, and whether the blade and blade clamp have virtual positions.
(2) Check whether the motor is loose and whether the outer rotor and stator of the motor have virtual positions.
(3) Check whether the connecting rod or rocker arm of the steering gear has a large virtual position, cracks or screws are loose. Check whether the fixing screw of the steering gear is loose or slippage.
(4) Check whether the manual movable steering gear has excessive damping when powered off.
(5) Check whether the arm buckle is loose or empty, whether the arm tail is fixed loosely, and whether the plastic mounting parts of the arm are degummed or cracked.
(6) Check whether the flight control fixation is loose and whether the hood frame is cracked.
(7) If it can be powered on, check on the App steering gear calibration page in the power-on state, to find whether there is a virtual control position in the step-by-step control of steering gear activities.
Excessive vibration of the body
Phenomenon description: during the flight of the agricultural drone, it is observed that there’s obvious shaking in the body or the vibration is too large when checking the flight log.
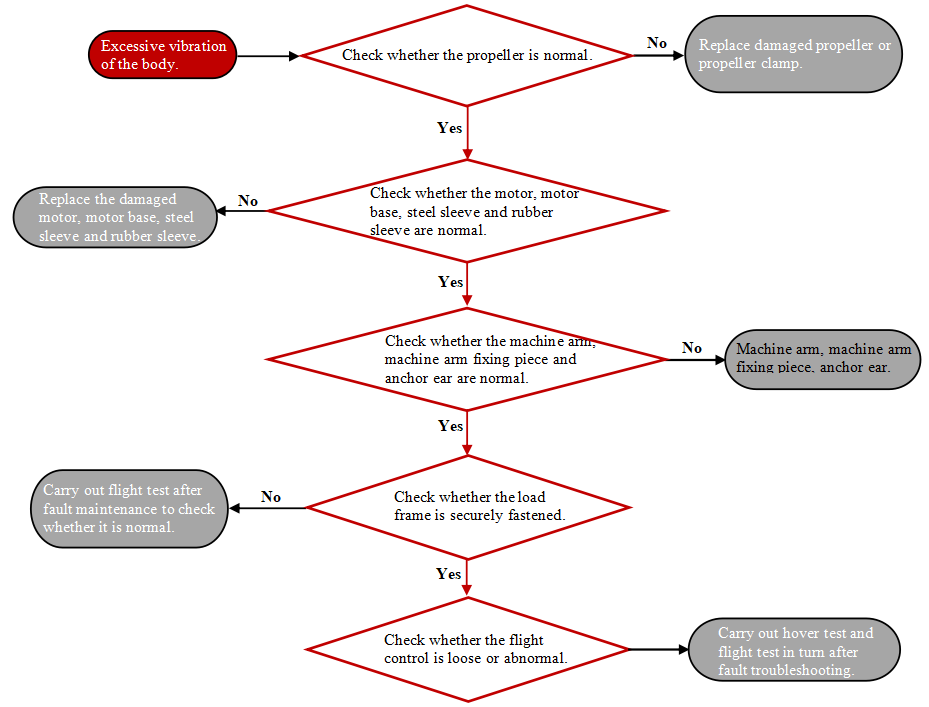
Cause analysis
(1) The propeller is loose or abnormal.
(2) The motor and its fixation are loose or abnormal.
(3) The arm is loose or abnormal.
(4) Installation of the load frame is loose or abnormal.
(5) The flight control is loose or abnormal.
Investigation steps and handling methods
(1) Check whether the propeller is damaged, deformed or loose, and whether the blade and blade clamp have virtual positions.
(2) Check whether the motor is loose, whether the outer rotor and stator of the motor are in virtual position, and whether the damping rubber sleeve is worn seriously.
(3) Check whether the folding part of the arm is loose or empty, whether the tail of the arm is fixed loosely, and whether the plastic mounting parts of the arm are degummed or cracked.
(4) Check whether the quick-release hasp of the load frame is loose and whether the damping rubber pad of the load frame is worn seriously.
(5) Check whether the flight control fixation is loose and whether the hood frame is cracked.
Flight Control and Sensing System
High volatility
Phenomenon description: during the flight mission of the agricultural drone, there is a high volatility higher or lower than the set route altitude.
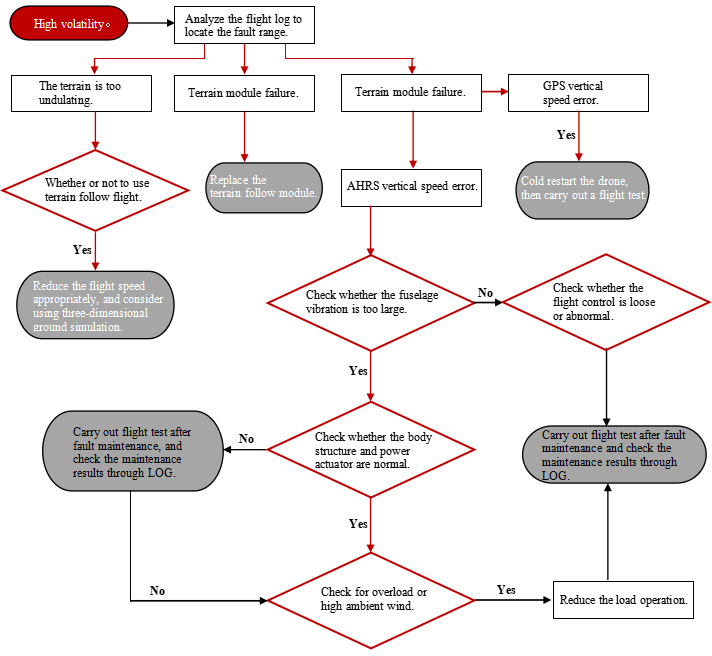
Cause analysis
(1) Terrain follow flight, the terrain is undulating.
(2) Terrain module height measurement error.
(3) The power actuator is abnormal.
(4) Power insufficiency due to excessive load and strong environmental wind.
(5) Error in fusion vertical velocity.
Investigation steps and handling methods
(1) Locate the scope of the problem through flight log analysis, and then further check the physical object or environment.
(2) If it is determined that the terrain is too undulating, it is recommended to reduce the terrain follow flight speed appropriately, or consider using three-dimensional ground simulation operation.
(3) It is recommended to replace the terrain module if it is determined that the terrain module has a height measurement error.
(4) If it is determined that the power actuator is abnormal, please check whether the propeller, motor and arm installation are abnormal, and replace them as required.
(5) If the load or environmental wind problem is identified, it is recommended to reduce the load or speed appropriately.
(6) If the fusion vertical velocity is judged to be wrong. If it is caused by excessive vibration, then to check the machine body; if it is cause by IMU or GPS vertical speed error, then to replace the flight control .
4D imaging radar is offline
Phenomenon description: "XAG One" App reports an error that the 4D imaging radar is offline.
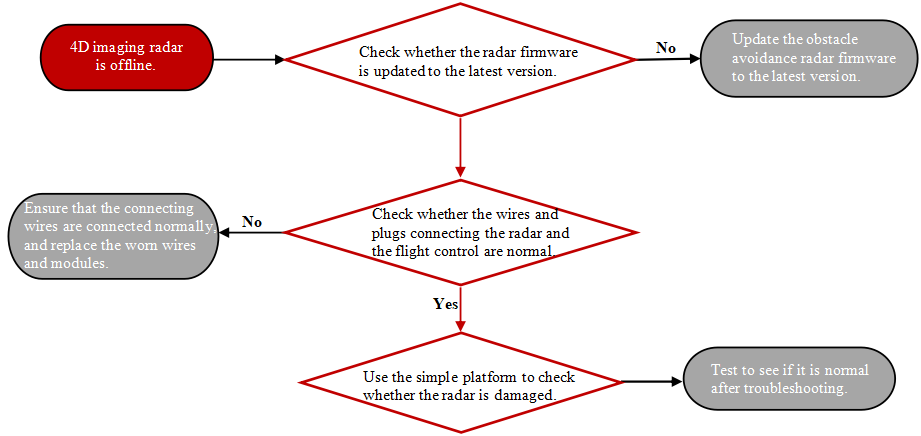
Cause analysis
(1) Firmware problem.
(2) Problems on cable connecting with flight control.
(3) Internal damage of 4D imaging radar.
Investigation steps and handling methods
Check for the latest firmware and update it.
Check whether the plug and cable connecting the radar and the flight control are damaged.
Use a simple platform to detect whether the radar is damaged.
4D imaging radar mismeasurement
Phenomenon description: "XAG One" App prompts that it is in the state of obstacle avoidance, and the agricultural drones will drift (always avoiding obstacles but there are no obstacles ahead).
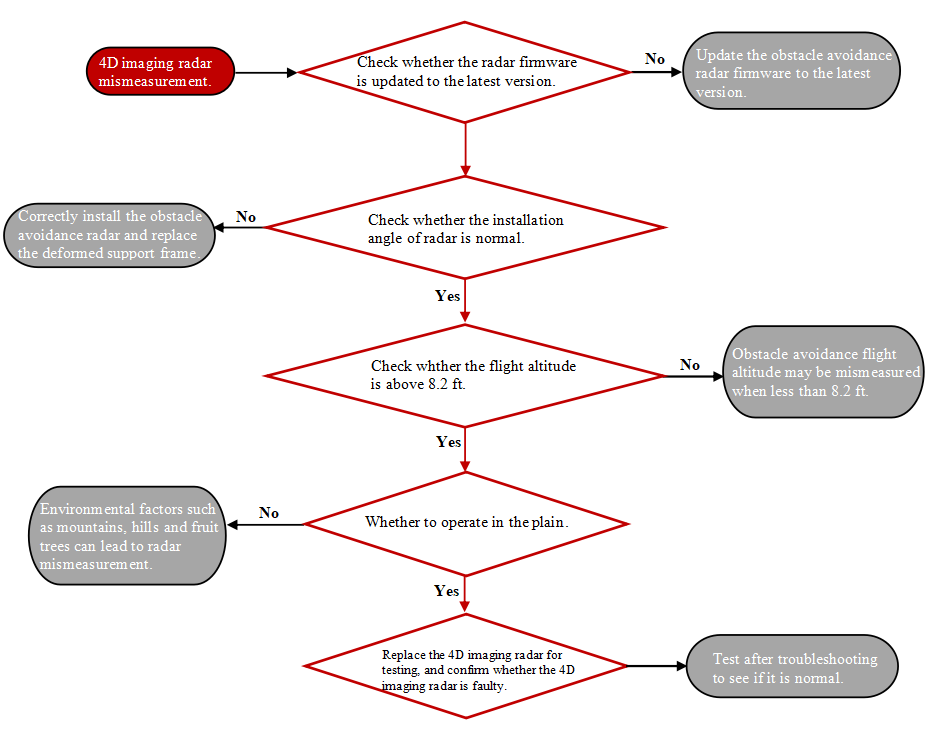
Cause analysis
(1) Firmware problem.
(2) Abnormal installation angle of radar.
(3) The flight altitude is too low.
(4) Environmental issues (such as flight operate in mountainous, hilly or fruit-bearing areas).
(5) Internal hardware is damaged.
Investigation steps and handling methods
(1) Check whether there is the latest firmware and then update it.
(2) Reseat the radar and restart the agricultural drone.
(3) Check whether the fixed part of the radar is deformed. Normally the two-dimensional code on the side of the radar can be parallel to the ground.
(4) The minimum flight altitude for obstacle avoidance is 6.56 ft, and above 8.2 ft is the best.
(5) Obstacle avoidance can only be applied to plain areas at present, and environmental factors such as mountains, hills and fruit trees will lead to radar mismeasurement.
(6) Replace the radar for test.
4D imaging radar is offline
Phenomenon description: "XAG One" App reports an error that the 4D imaging radar is offline.
Cause analysis
(1) Firmware problem.
(2) Cable connecting problems with flight control.
(3) Internal damage of 4D imaging radar.
Investigation steps and handling methods
(1) Upgrade the firmware to the latest version.
(2) Plug and unplug, check whether the plug and cable are damaged, and ensure that the cable is firmly fixed by the cable tie.
(3) Restart the agricultural drone.
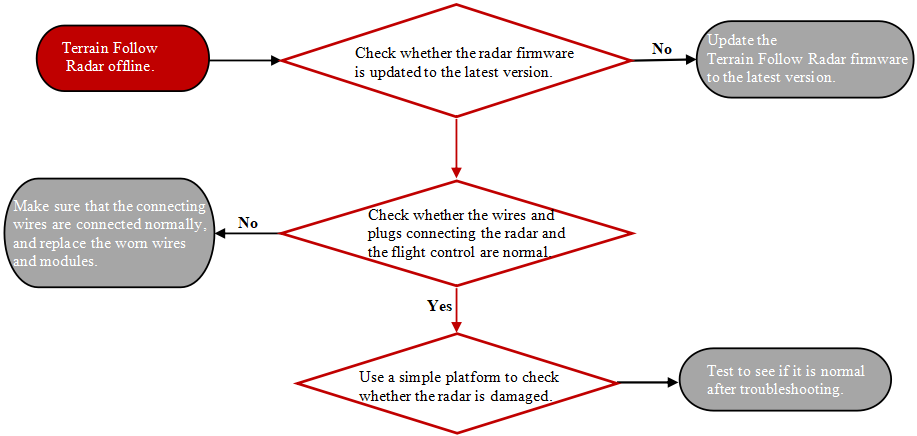
Terrain Follow Radar mismeasurement
Phenomenon description: The height of agricultural drone fluctuates, and the height measurement of Terrain Follow Radar is abnormal.
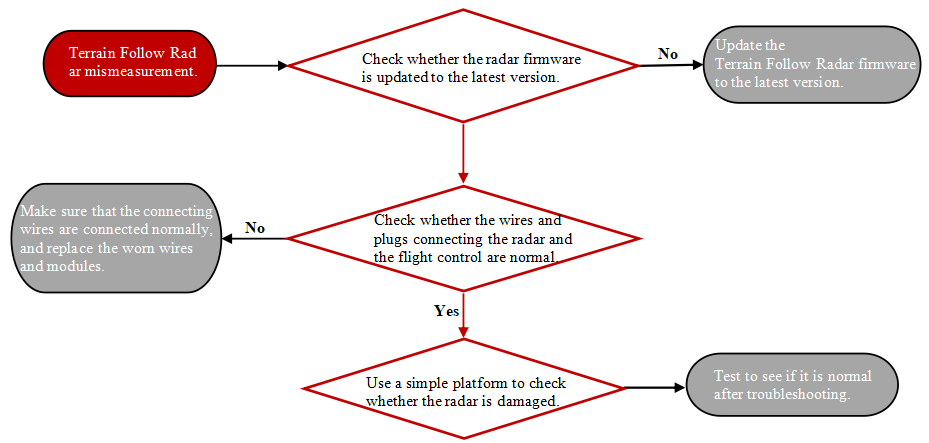
Cause analysis
(1) Firmware problem.
(2) Internal hardware is damaged.
Investigation steps and handling methods
(1) Upgrade the firmware to the latest version.
(2) Re-plug and restart the agricultural drone.
(3) Use a simple platform to detect and replace the faulty Terrain Follow Radar.
Agricultural drone offline, flight control offline
Phenomenon description: the flight control communication abnormal and the flight control offline.
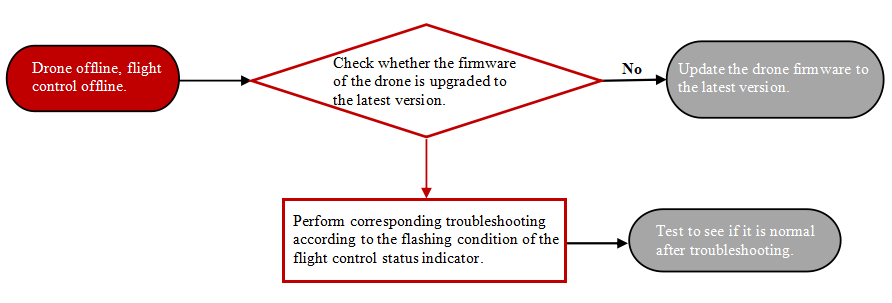
Cause analysis
(1) Firmware problem.
(2) The connection between the flight control and the PTS of the center cabin is abnormal.
(3) Abnormal network communication.
Investigation steps and handling methods
(1) Upgrade the firmware to the latest version.
(2) Check the status of the flight control light:
a. The flight control lights are not on at all. Check whether there is open circuit or poor connection with the connecting line of the wiring board.
b. Some of the flight control lights are not on, and the internal hardware of the flight control is damaged.
c. The green light of the cloud communication light flashes slowly. Check "Flight Control Cloud Communication Light Green Light Flashes Slowly" for troubleshooting steps.
d. The red light of the cloud communication light flashes quickly. Check "Flight Control Cloud Communication Light Red Light Flashes Quickly" for the troubleshooting steps.
Flight control cloud communication light green light flashes slowly
Phenomenon description: The green light of the communication light in the flight control cloud flashes slowly, and the agricultural drone is offline.
Cause analysis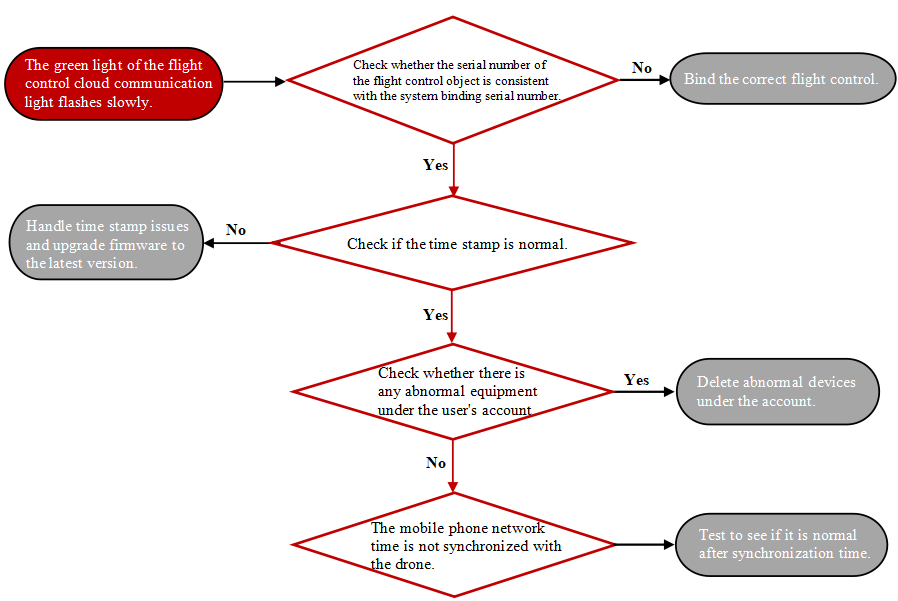
(1) The serial number of the flight control object on the agricultural drone is inconsistent with the serial number of the flight control bound to the system.
(2) Time stamp problem.
(3) Abnormal equipment exists under the user's account.
(4) The mobile phone network time is not synchronized with the agricultural drone.
Investigation steps and handling methods
(1) Through plant protection management - use the equipment query function to check the serial number bound to the agricultural drone system and checks it with the flight control installed on the agricultural drone, and ensure consistency.
(2) Through plant protection management - use the equipment query function to check the flight control ID (FC-ID) of the agricultural drone equipment query function, and cop and pasting the FC-ID to a https://dev.iot.xa.com/timecheck/ to check. If it is confirmed to be a timestamp problem, upgrade it after processing.
(3) Agricultural drones are offline in their own accounts and shared online in other accounts. It can perform network health diagnosis on the offline account, and copy the abnormal device ID to XAG Cloud. Inquire the serial number of the corresponding abnormal equipment, contact the owner to unbind and re-bind the abnormal equipment.
(4) Update the time of the mobile phone in the mobile phone setting to keep synchronization with the network time.
Flight control cloud communication light red light flash quickly
Phenomenon description: The red light of the communication light in the flight control cloud flashes quickly, and the agricultural drone is offline.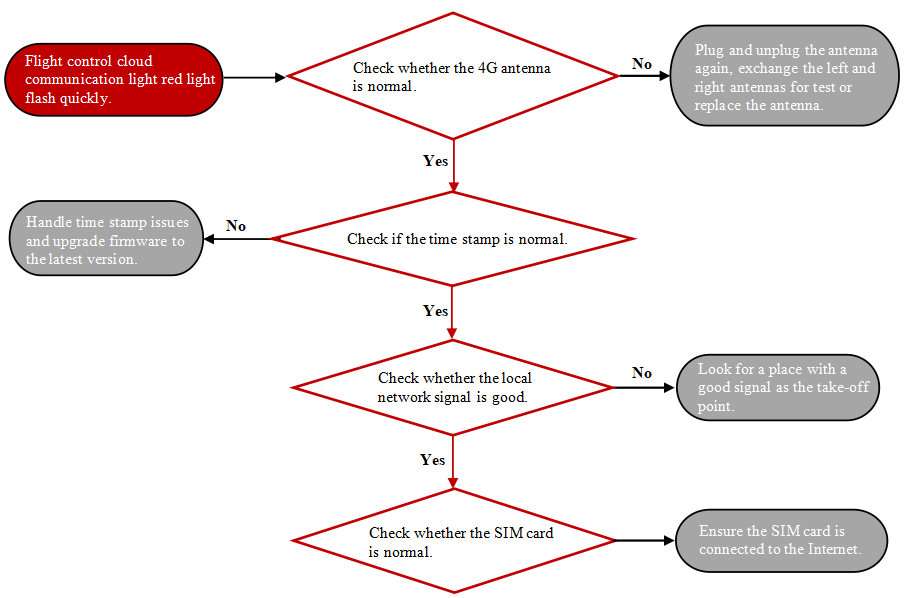
Cause analysis
(1) The 4G antenna interface is in poor contact, or the antenna is damaged.
(2) Time stamp problem.
(3) The local network signal coverage is not good and the network signal is poor.
(4) When the agricultural drone is placed on the ground, the terrain is low, and the network signal may not be covered.
(5) The SIM card cannot be identified due to the unstable contact of the card slot caused by the heat deformation or the long-term operation vibration.
Investigation steps and handling methods
(1) Check that the 4G antenna is loose, plug and unplug the antenna again, and exchange the left and right antennas.
(2) Through plant management - use the equipment query function to check the flight control ID (FC-ID) of the agricultural drone, and cop and pasting the FC-ID to https://dev.iot.xa.com/timecheck/ If it is confirmed to be a timestamp problem, upgrade it after processing.
(3) Check whether the mobile phone signal is good, and look for the place with good signal as the take-off point.
(4) Raising the agricultural drone higher, or placing the agricultural drone in a higher position.
(5) Remove the strip-shaped rear cover of the flight control, and plug and unplug the SIM card again (operate when the flight control is powered off); If it still can't access the Internet after re-plugging, you can try to replace your mobile phone card to test.
Precautions
• The two SIM cards in the flight control cannot be interchanged, otherwise the card lock will be triggered, causing the card to be shut down and unable to access the internet.
• Card replacement or card insertion and removal must be carried out when the flight control is turned off, otherwise the card lock may be triggered.
• Cards on agricultural drones cannot be changed to mobile phones or other devices for use testing, otherwise the card will be shut down.
Agricultural drone sensor anomaly
Phenomenon description: "XAG One" App indicates that the sensor of agricultural drone is abnormal.
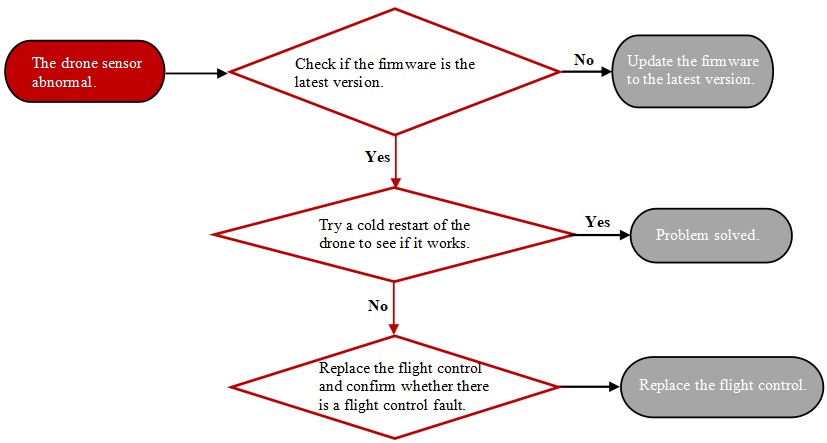
Cause analysis
(1) Firmware problem.
(2) Flight control hardware problem.
Investigation steps and handling methods
(1) Upgrade the firmware to the latest version.
(2) Cold restart of agricultural drones.
(3) Replace the flight control.
PSL Pilot View Image not displayed
Phenomenon description: The operation interface of "XAG One" is unable to display the pilot view image.
Cause analysis
(1) Firmware problem.
(2) The camera is offline.
Investigation steps and handling methods
(1) Upgrade the firmware to the latest version.
(2) Check the camera cable and plug for damage and poor connection.
(3) Plug and unplug, restart the agricultural drone.
(4) Replace with a new PSL camera.
RTK positioning system
Bad satellite signal
Phenomenon description: "XAG One" App prompts that "the agricultural drone has not entered the RTK state, and the number of satellites is small"; Or check the flight log to show that the agricultural drone is out of RTK and the number of satellites is small.
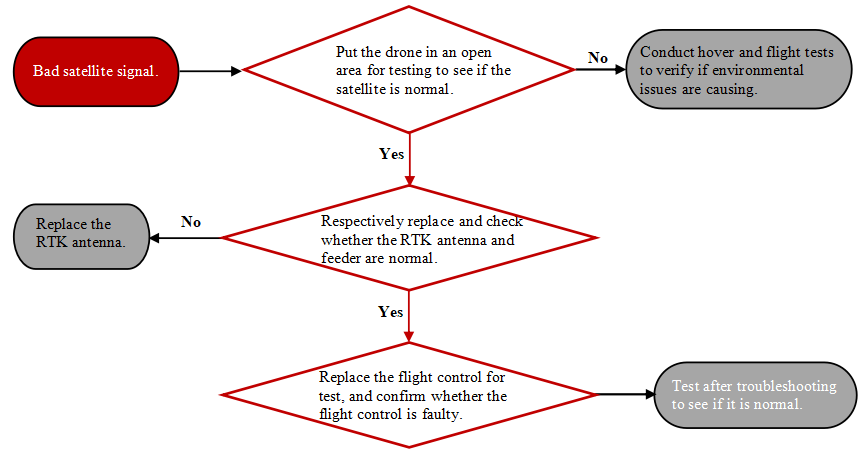
Cause analysis
(1) There is interference or occlusion in the environment where the equipment is located.
(2) RTK antenna or feeder is loose, damaged or in poor contact.
(3) Failure of flight control hardware.
Investigation steps and handling methods
(1) Ensure that the equipment is outdoors, the environment is open, and there is no large shelter (such as tall buildings, windbreaks, etc.).
(2) Remove the left and right RTK antenna heads in turn, and check whether the connection between the feeder and the antenna head is damaged, loose or abnormal.If there is any abnormality, please replace it.
(3) If there is no obvious appearance abnormality of the antenna and its feeder, please install the left and right antennas separately in turn for ground test. Observe whether the number of satellites and their positioning accuracy are normal (the number of satellites is greater than about 25, and the positioning accuracy is less than 0.1). Determine whether an RTK antenna is abnormal. If so, replace it.
(4) If everything is normal, please perform the hover test and flight test. Observe whether the number of satellites, positioning accuracy and course accuracy are normal (the number of satellites is greater than about 25, and the positioning accuracy is less than 0.1.Course accuracy is less than 1). Before testing, make sure that the terrain module functions properly, the ground vision lens is clean, and the ground texture is clear.
(5) If the hover test and flight test are normal, the satellite signal is poor due to environmental interference. If not, please replace the part for test.
Excessive RTK delay
Phenomenon description: "XAG One" App prompts RTK delay is too large. RTK delay refers to the time difference between the last time the agricultural drone received the differential data sent by the base station.The larger the RTK delay is, the worse the positioning accuracy of agricultural drone is. Normally, it can still reach centimeter level within 0 ~ 600 seconds. When the RTK delay is more than 600 seconds, the positioning accuracy of agricultural drones may deviate greatly.
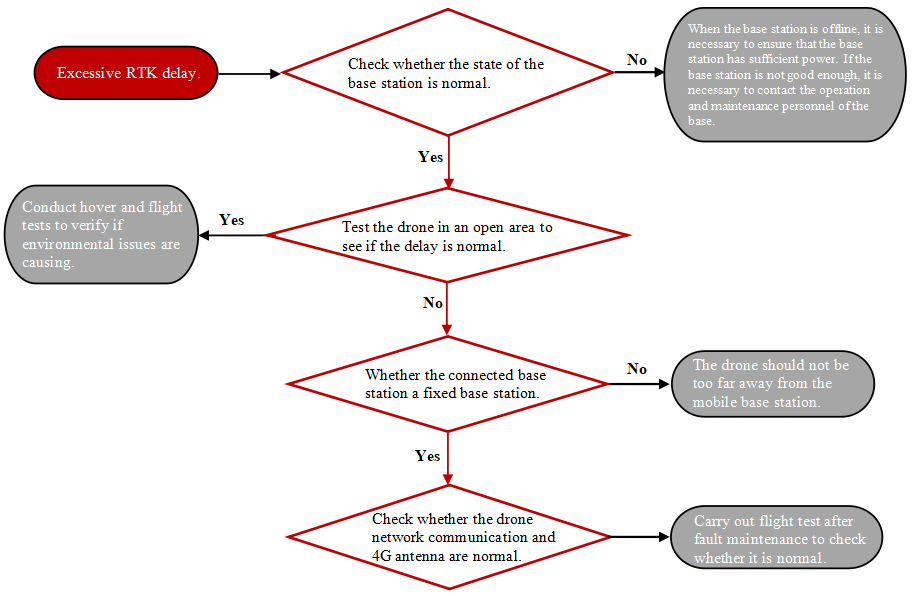
Cause analysis
(1) There is interference or occlusion in the environment where the equipment is located.
(2) The base station signal is abnormal.
(3) The communication link of agricultural drone is abnormal.
Investigation steps and handling methods
(1) Check whether the base station is offline or the base station is not good enough to report errors in the official account of "Guangzhou XAG Science and Technology Co., Ltd."-Base Station Management.If an error is reported, it is necessary to check the electric quantity of the fixed base station and the network status of the base station.
(2) Place the agricultural drone in an open environment, and connect the base station to perform idle test, hovering test and flight test in turn. If the RTK delay returns to normal, it indicates that there is environmental interference in the original flight environment. If there is still any abnormality, please continue to investigate.
(3) If the connected base station is a fixed base station, firstly checking whether the network signal of the "XAG Oone"App communication system is normal, then check whether the 4G antenna on the agricultural drone is normal. If it is abnormal, the replacement test can be carried out.
(4) If that connected base station is a mobile base station, firstly checking whet the agricultural drone exceeds the coverage of the mobile base station, then check if the 2.4/5.8G antenna and feeder are normal. If they are abnormal, replace them for testing.
Heading accuracy of 25.5 ° or 0 °
Phenomenon description: After starting the drone power, App shows that the heading accuracy of agricultural drone is 25.5 ° or 0 °.
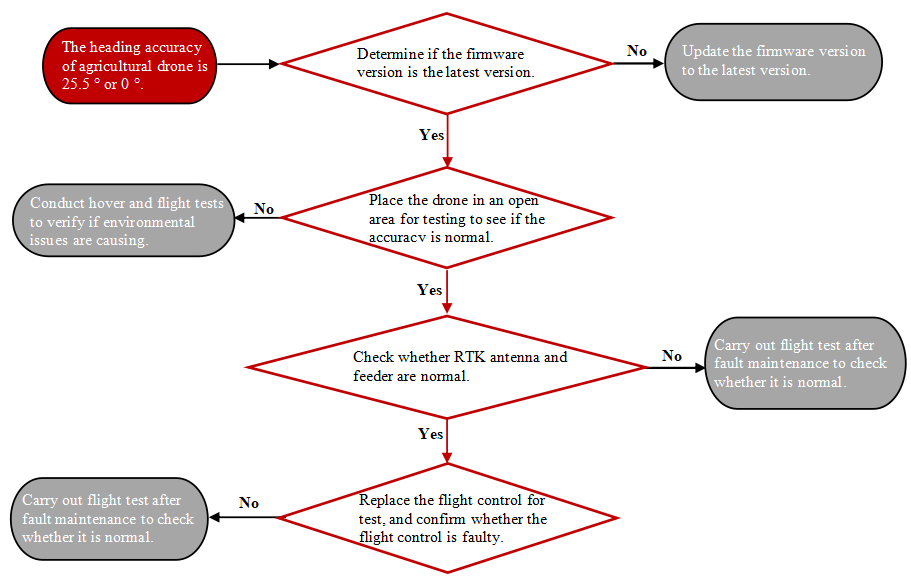
Cause analysis
(1) The software or firmware is not updated to the latest.
(2) RTK antenna or feeder is loose, damaged or in poor contact.
(3) The internal antenna of the flight control is loose or the flight control fails.
Investigation steps and handling methods
(1) Determine whether the firmware version of each module of "XAG One" App is the latest.
(2) Check whether the RTK is connected incorrectly, loose, damaged or in poor contact.
(3) Ensure that the equipment is outdoors, the environment is open, and there is no large shelter (such as tall buildings, windbreaks, etc.).
(4) Remove the left and right RTK antenna heads in turn, and check whether the connection between the feeder and the antenna head is damaged, loose or abnormal.If there is any abnormality, please replace it.
(5) If there is no obvious appearance abnormality of the antenna and its feeder, please install the left and right antennas separately in turn for ground test.Observe whether the number of satellites and their positioning accuracy are normal (the number of satellites is greater than about 25, and the positioning accuracy is less than 0.1).Determine whether an RTK antenna is abnormal. If so, replace it.
(6) If everything is normal, please perform the hover test and flight test, observe whether the number of satellites, positioning accuracy and course accuracy are normal (the number of satellites is greater than about 25, and the positioning accuracy is less than 0.1.Course accuracy is less than 1). Before testing, make sure that the terrain module functions properly, the ground vision lens is clean, and the ground texture is clear.
The remote control cannot enter mapping mode
Phenomenon description: When using the remote control for mapping and dotting, it cannot enter the mapping mode.
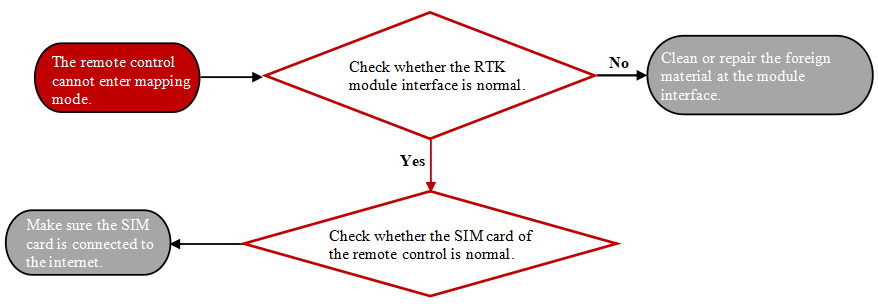
Cause analysis
(1) The RTK module of the remote controller fails or the interface is loose, resulting in the failure of normal operation.
(2) The remote control SIM card has no traffic and cannot transmit data normally.
Investigation steps and handling methods
(1) Check the RTK module interface for foreign matters.
(2) Please insert the differential positioning module (RTK module) into the top of the remote controller.When you hear "Module inserted" from the single-hand controller and "Positioning module connected" from it again a few seconds later, indicates that the positioning module has been successfully inserted.
(3) Check the SIM card of the remote control is normal.
(4) Observe the single-hand controller signal lamp, and judge and analyze the corresponding indicator lamp.
Flight control RTK signal lamp | tatus description |
Red lights on | No star search, no positioning, the board has no outpu |
Red lights flash slowly | RTK Timeout greater than 10 seconds |
Green lights flash slowly | Normal |
Red lights flash quickly | RTK sign out, no differential signal, no heading |
Green lights flash quickly | The number of satellites is less than 16, and the heading accuracy is less than 2 Degree |
Red and green lights flashes | Initialize or configure |
Red and green lights flashes quickly | Solid part upgrading |
Agricultural Drone can not enter RTK or exits halfway
Phenomenon description: When the agricultural drone started normally, it cannot enter the RTK state, or exits half way after entering the RTK state.
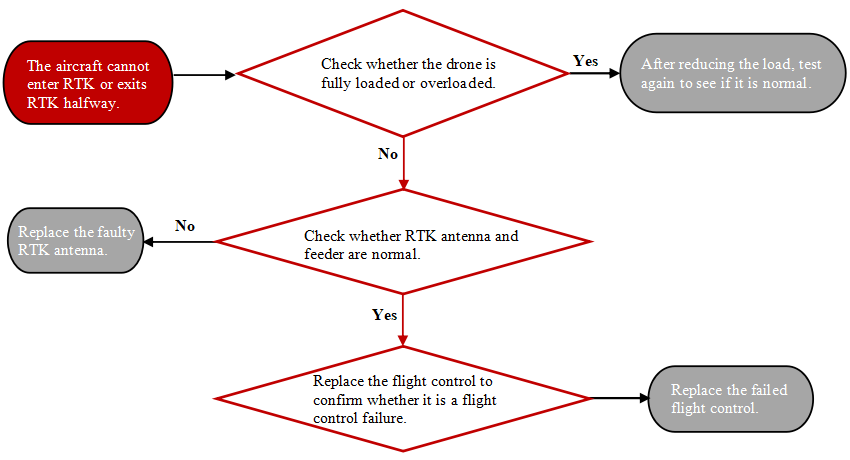
Cause analysis
(1) The equipment is placed indoors, resulting in RTK instability.
(2) RTK antenna is blocked by foreign matters, affecting signal reception.
(3) RTK is faulty or the antenna interface is in poor contact.
Investigation steps and handling methods
(1) If the agricultural drone is located indoors, please move it to an open area with no shelter above.
(2) Before the agricultural drone enter the RTK, do not use foreign objects to cover (place) above the RTK antenna.Personnel are also requested to stay one meter away from the agricultural drone.
(3) After the agricultural drone enters the RTK, do not place foreign objects above the antenna or block the RTK antenna.Check whether the connections are in good contact.
(4) Remove the left and right RTK antenna heads in turn, and check whether the connection between the feeder and the antenna head is damaged, loose or abnormal.Replace it in case of any abnormality.
Electrical System
Abnormal battery light flashing
Phenomenon description: The battery power light of the agricultural drone flickers or flickers abnormally during the operation.
Cause analysis
(1) Five power lamps of the battery, which represent different battery remaining capacity and health status, wherein:
a. 5 green lights on, representing power amount: 90% -100%
b. 4 green lights on, representing power amount: 70% -89%
c. 3 green lights on, representing power amount: 50% -69%
d. 2 green lights on, representing power amount: 30% -49%
e. 1 green light on, representing power amount: 10% -29%
Investigation steps and handling methods
(1) 1 green light single-flashing: 1% -10%.
(2) 2 green lights double-flashing: the battery is in the fault lock state and can no longer be used, needs to be repaired and unlocked.
(3) 3 green lights double-flashing: the battery is in the cloud lock state and can no longer be used, needs to be repaired and unlocked.
(4) 4 green lights double-flashing: the battery is in the state of anti-disassembly lock and can no longer be used, needs to be repaired and unlocked.
(5) 2 lights and 3 lights flash alternately: the battery is in the overcurrent lock state and cannot be used again, needs to be repaired and unlocked.
(6) 2 lights and 4 lights flash alternately: the two batteries are in power-on prohibited state t, and it is necessary to ensure the voltage of the two batteries is similar.
(7) Red light on: it can be charged and discharged normally.
(8) Red light flashes slowly: the internal temperature of the battery is low, and the red light flashes at 1.25Hz. At this time, charging is prohibited.
(9) Red light flashes slowly: The internal temperature of the battery is too high, and the red light flashes at 2.50Hz. At this time, the battery cannot be charged.
(10) Red light double-flashing: the battery is faulty, such as large voltage deviation of the battery, abnormal temperature sensor, etc., and cannot be charged at this time.
Battery plug over temperature
Phenomenon description: During the operation of the agricultural drone, the temperature of the tail battery plug is abnormally high.
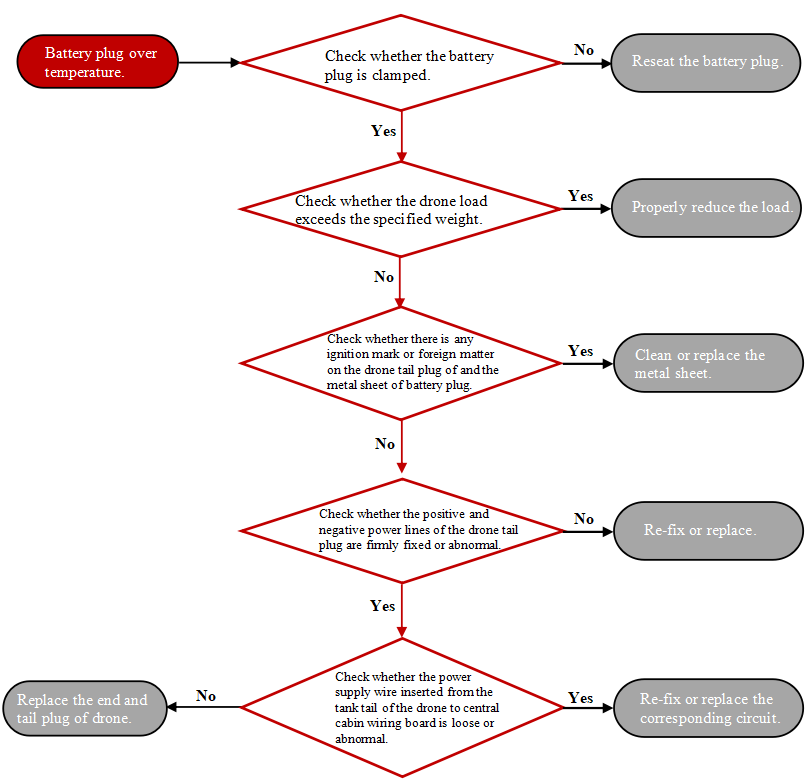
Cause analysis
(1) The battery plug is not clamped.
(2) Agricultural drones fly with full load or overload, and the battery discharge is too large or abnormal.
(3) There are ignition marks or foreign matters on the tail plug or the metal sheet of battery of the drone.
(4) The positive and negative power lines of drone tail plug are not fixed firmly or abnormal.
(5) The power supply line of the drone end and tail inserted into central cabin wiring board is loose or abnormal.
Investigation steps and handling methods
(1) Re-fix the battery plug.
(2) In case of heavy load operation, it is recommended to reduce the load operation.
(3) Check whether there are ignition marks or foreign matters on the tail plug or the metal sheet of battery plug of the drone.
(4) Check whether the positive and negative power lines of the tail plug of the drone are not fixed firmly or abnormal.
(5) Check whether the power supply wire inserted into the wiring board at the end of the drone is loose or abnormal.
Smart Battery Offline or Midway Disconnect
Phenomenon description: When the smart battery powered-on and disconnected midway, the "XAG One" software shows the battery offline.
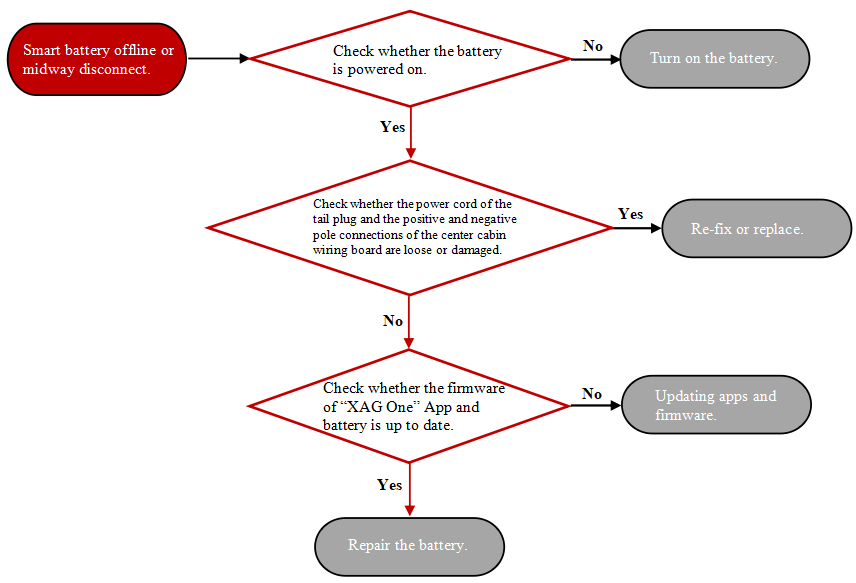
Cause analysis
(1) The battery is not on.
(2) Battery firmware or software version are not updated.
(3) The battery tail plug is faulty or the tail plug signal line is broken.
Investigation steps and handling methods
(1) Please check whether the battery is on.
(2) Update the "XAG One" App software and battery firmware.
(3) Check the tail plug power supply, connection between the positive and negative poles of the central cabin wiring board to see if there is any damage.
The single battery cannot be turned on
Phenomenon description: P-series agricultural drone uses single battery for seeding operation, and the battery cannot be turned on.
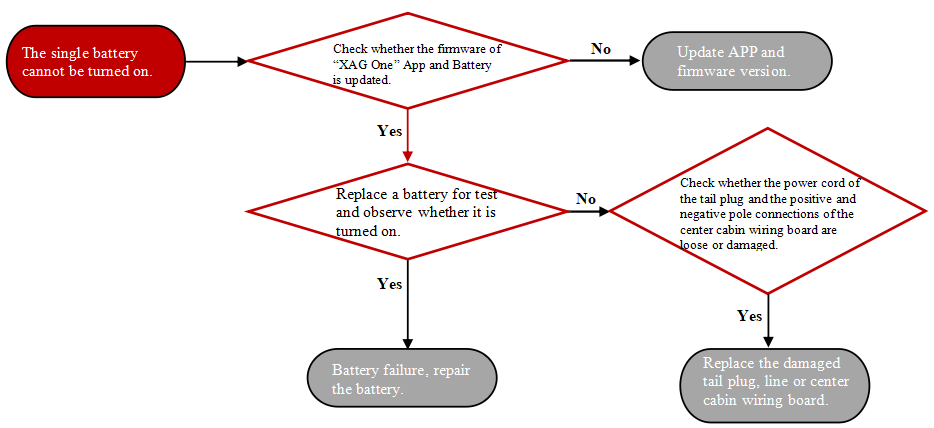
Cause analysis
(1) The battery firmware is not the latest version.
(2) The connection between the positive and negative poles of the battery tail plug or the central cabin wiring board is damaged.
(3) The battery is faulty.
Investigation steps and handling methods
(1) Upgrade the battery firmware and confirm that the battery firmware is in the latest version.
(2) Replace a battery for testing, check and judge whether it is the problem at the battery end or the drone end.
(3) Check whether the power supply tail plug signal line is connected properly, and whether there is poor contact or damage.
(4) Check whether the battery is faulty.
Dual-batteries cannot be turned on
Phenomenon description: The agricultural drone uses dual batteries, the first battery can be turned on normally, and the second battery cannot be turned on.
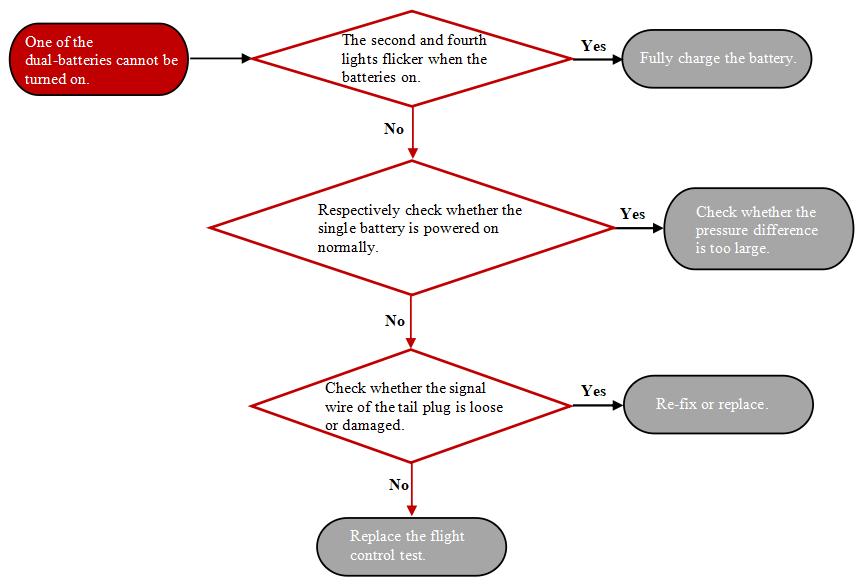
Cause analysis
(1) Do not start the machine if the voltage difference between the two batteries is large.
(2) Abnormal battery communication.
(3) Poor contact or damage of power supply tail plug signal line.
(4) Flight control failure.
Investigation steps and handling methods
(1) The second and fourth lights flicker when powered on. Please fully charge both batteries.
(2) If the battery power indicator is constant and the battery is not turned on, turn on the single battery separately, and the "XAG One" App cannot see the battery information.
(3) Check whether the tail plug signal line is connected properly, and whether there is poor contact or damage situation.
(4) Check and replace the flight control.
Battery level is not displayed
Phenomenon description: When the battery is connected to the agricultural drone end, the battery cannot be started normally and the battery level is also not displayed.
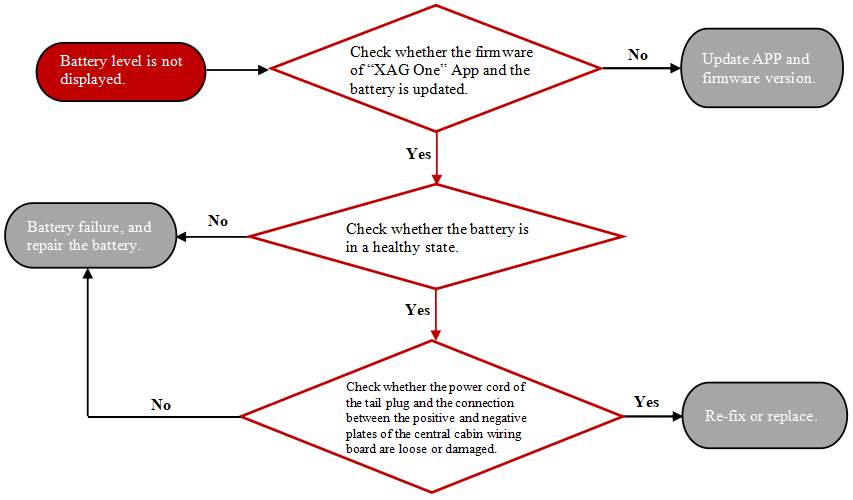
Cause analysis
(1) The battery firmware is not the latest version.
(2) The battery is faulty.
(3) The battery tail plug or the connection between the positive and negative poles of the central cabin wiring board is damaged.
Investigation steps and handling methods
(1) Update the "XAG One" App and battery firmware.
(2) Please check whether the battery is in a healthy state.
(3) Check the battery tail plug and the connection of the positive and negative poles of the center cabin wiring board to see if they are damaged.
Communication System
Error reports "odevice detected nearby" when adding the agricultural drone
Phenomenon description: When adding agricultural drone operation equipment, the software reports an error, displaying "no equipment detected nearby".
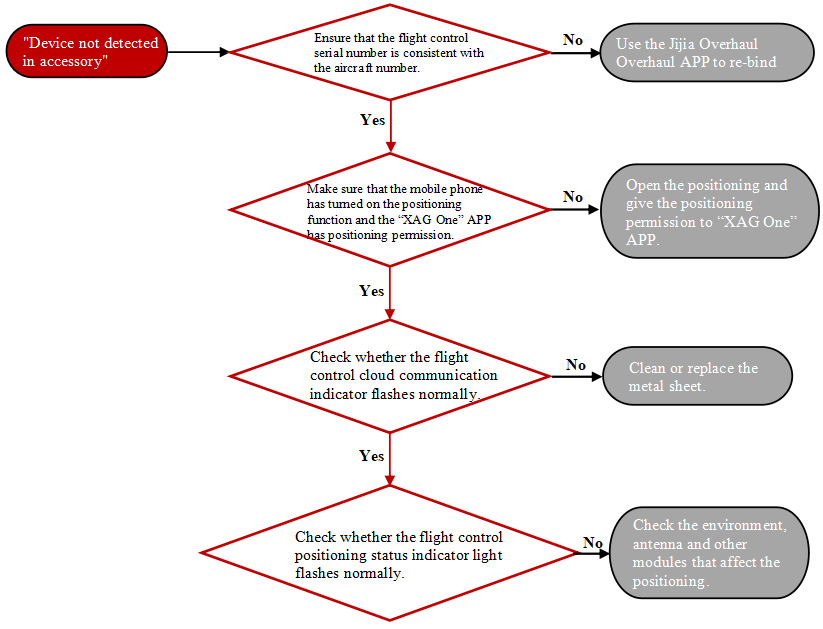
Cause analysis
(1) Agricultural drones are not authorized or bound.
(2) If the distance between the agricultural drone and the mobile phone is more than 0.62mi, there will be such an error.
(3) Abnormal network communication of agricultural drone.
(4) The positioning system of agricultural drone is abnormal.
Investigation steps and handling methods
(1) Before adding equipment, please confirm that the agricultural drone to be added is not bound by other users.The physical flight control serial number is consistent with the binding flight control serial number.
(2) If the distance between the agricultural drone and the mobile phone is more than 0.62mi, there will be such an error. Please move the agricultural drone to the open space and turn on the power supply. Make sure that the mobile phone positioning has been opened and the "XAG One" App has obtained the positioning permission.
(3) Check the flight control cloud communication indicator to ensure that the network communication of agricultural drones is normal.
(4) Check the flight control positioning status indicator to ensure that the agricultural drone positioning system is normal.
The remote control cannot be connected to the mobile phone
Phenomenon description: After the remote control is powered on, the mobile phone cannot be connected to the it normally.
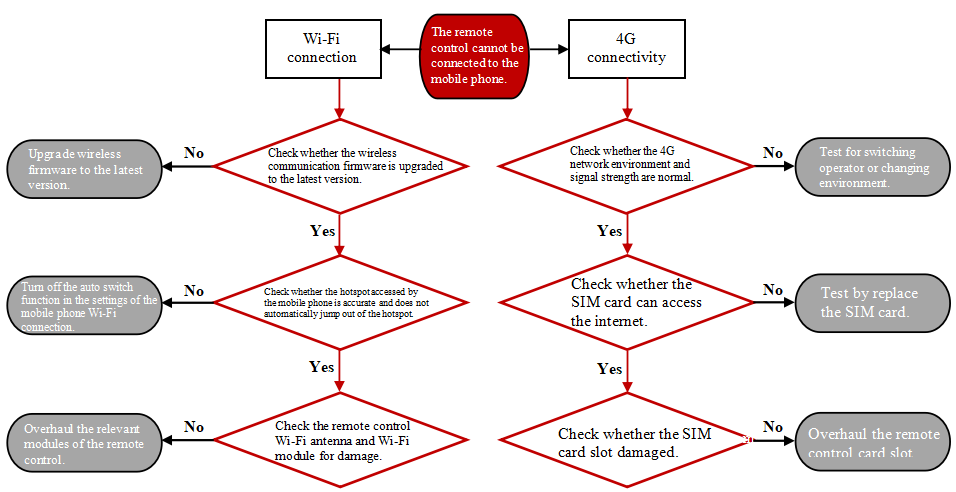
Cause analysis
(1) Abnormal network communication.
(2) Abnormal Wi-Fi communication.
Investigation steps and handling methods
(1) When using 4G connection, check the network environment and signal strength of mobile phone and remote control, and try to change different operators.
(2) Check whether the SIM card can access the internet (the built-in IOT card will be locked when it is removed from the device).
(3) Check whether the card slot is damaged or returned to the factory for treatment.
(4) When using Wi-Fi connection, check whether the firmware is updated to the latest version.
(5) Whether the mobile phone hotspot is connected accurately and does not automatically jump out of the hotspot.
(6) Check whether the Wi-Fi antenna and Wi-Fi module are damaged.
The remote control cannot bind the agricultural drone
Phenomenon description: The third light of the drone connection indicator is not on, and the binding between the remote control and the agricultural drone fails.
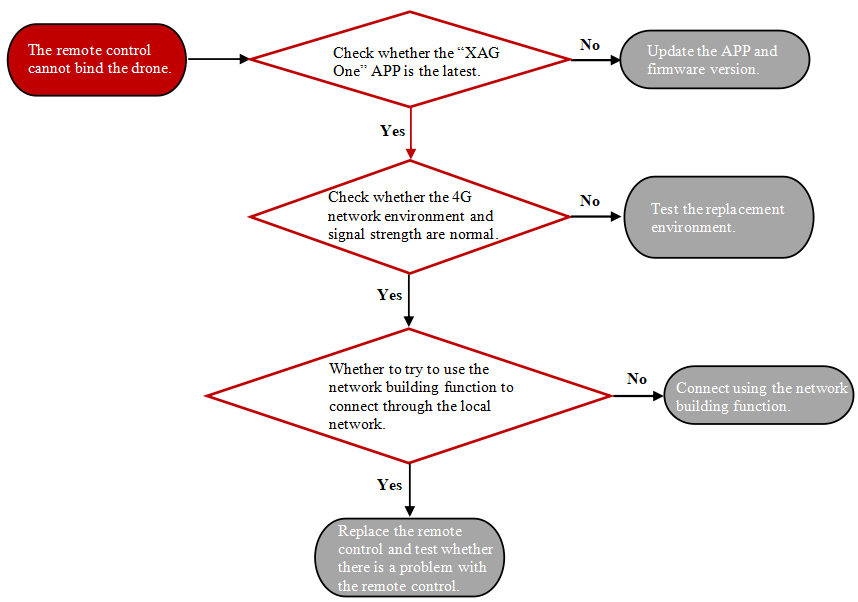
Cause analysis
(1) The delay of 4G link is too large, and the version of App is not updated.
(2) Hardware failure of remote control.
Investigation steps and handling methods
(1) Check their respective network environment and signal strength, and try to change different operators.
(2) Use the networking function to connect through the LAN.
(3) Replace the remote control to eliminate the hardware problem of it.
| Wireless communication light | Status description |
Green light on | Drone communication is normal |
Green light single-flashing | Remote control communication initialization |
Yellow light single-flashing | In network building function |
Lights off | Drone disconnected |
The remote control red light flickers, and cannot enter the green light mode
Phenomenon description: When the single-hand controller started normally, the 6 lights of it are always in the red mode instead of green.
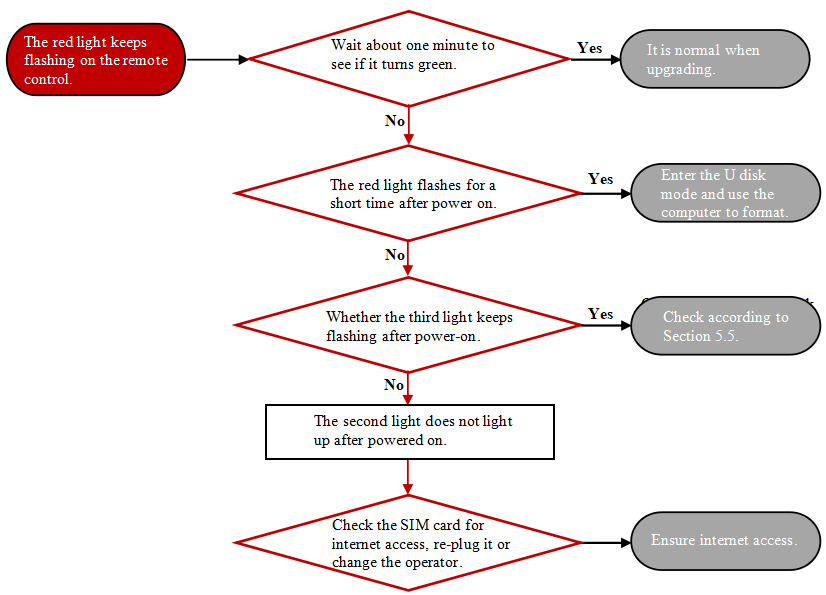
Cause analysis
(1) Touch the function key of the remote control by mistake, causing the remote control to be in updating or frequency setting state.
(2) Remote control data is abnormal on the internet.
Investigation steps and handling methods
(1) It’s normal while during upgrading process. Please wait for flashing and automatically shut down. The time is about 1 minute.
(2) If the red light flashes every time the machine is turned on, please enter the U disk mode and use the computer to format the U disk.
(3) If it is adding mode (available after 2021 edition): it can not be added if it keeps flashing or turns off after flashing, check the network.
(4) After normal startup, check whether the third light keeps flashing. See 5.5 for troubleshooting steps.
(5) After normal startup, check whether the second light is on. If it is not on, it means that the internet cannot be accessed.
(6) Whether the SIM card can access the internet normally. Try to replug it or change the operator. Generally, the signal is good or bad: China Mobile > China Telecom > China Unicom.
| Mobile network light | Status description |
Green lights on | Internal network communication is normal |
Green lights single-flashing | Internal / external network communication is normal |
Yellow lights on | LNT Mode communication is normal |
Red lights on | Communication abnormal |
Lights off | Not SIM card detected |
The third green light keeps flashing when the remote control powered on
Phenomenon description: The third green light keeps flashing after the remote control is turned on.
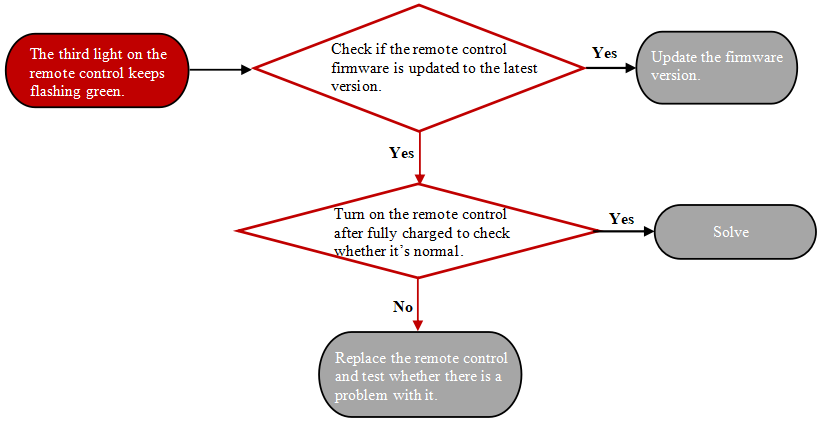
Cause analysis
(1) The remote control board firmware is not the latest version.
(2) The power of the remote control is insufficient.
(3) Remote control Wi-Fi module failure or Wi-Fi firmware problem.
Investigation steps and handling methods
(1) Upgrade the remote control board firmware to the latest version.
(2) Charge the remote control and turn it on again.
(3) Confirm whether it has been dropped, which may damage the Wi-Fi module and cause poor contact.
(4) Contact R & D for treatment or maintenance.
Operator network handover failed
Phenomenon description: According to the operation requirements, the mobile phone cannot complete the network operator switching.
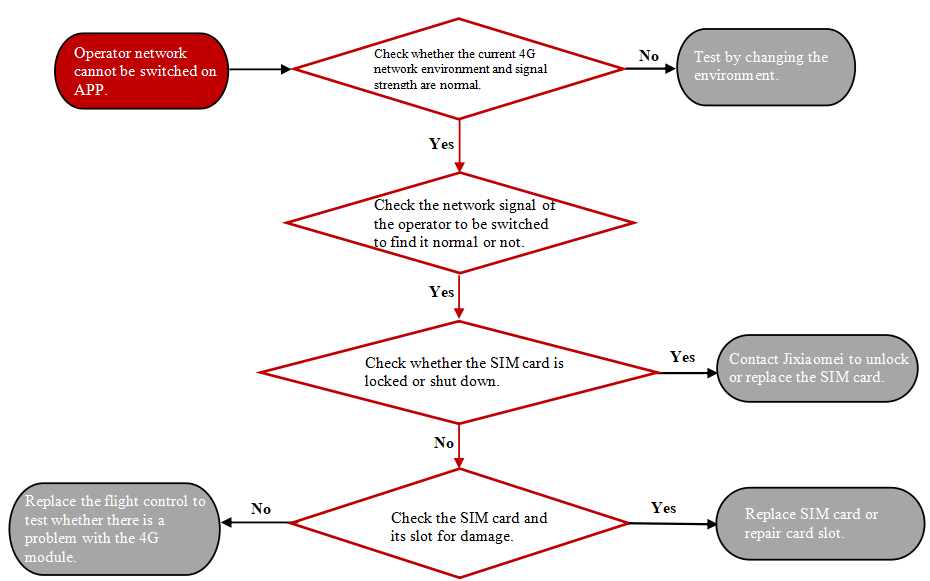
Cause analysis
(1) Due to hardware reasons, the 4G module is abnormal, and the flight control cannot identify the module.
(2) The card or card slot hardware is abnormal, resulting in failure to identify the card.
(3) The card has been plugged and unplugged, or the operator has problems, resulting in card locking and shutdown.
(4) The network signal of the corresponding local operator is poor.
(5) The current network operator is poor, resulting in the instructions issued by App can not reach the device.
Investigation steps and handling methods
(1) Confirm that the network in the location is in good condition, and try to replace the normal SIM card.
(2) Replace the flight control.
RevoSpraying System
Spraying System calibration failed
Phenomenon Description: During the calibration of the Spraying System after upgrading the firmware and replacing the piping system such as nozzles, water pumps, etc., App side prompts calibration failure.
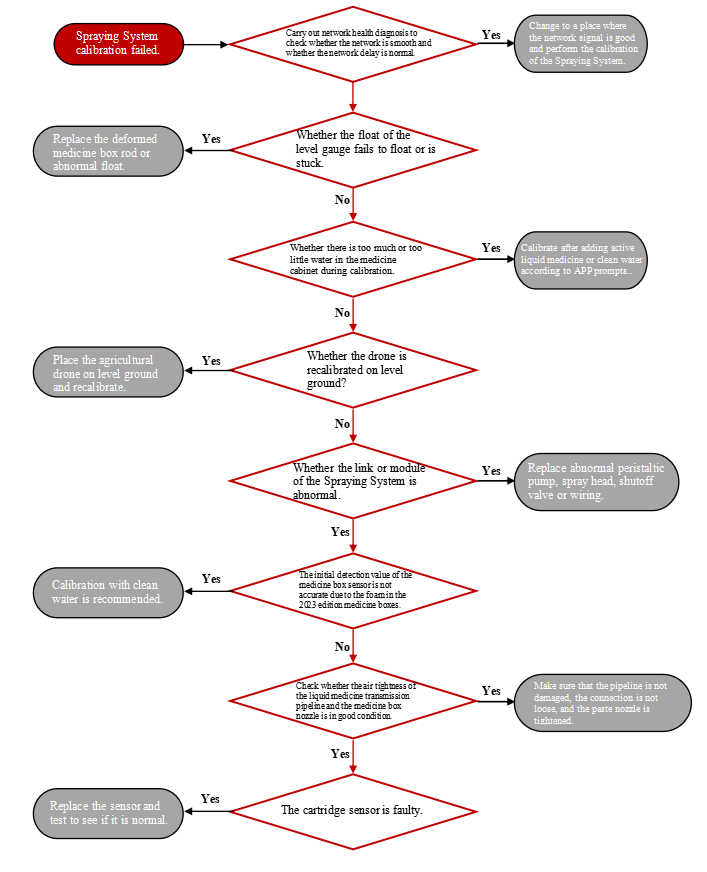
Cause analysis
(1) Poor network signal.
(2) The float of the level gauge cannot float or is stuck.
(3) Too much or too little water in the medicine box during calibration.
(4) The drone is not placed on the level ground for calibration.
(5) The link or module of the Spraying System is abnormal.
(6) The initial detection value of the medicine box sensor is inaccurate due to the foam in the 2023 edition medicine boxes.
(7) Check whether the air tightness of the liquid medicine transmission pipeline and the medicine box nozzle is in good condition.
(8) The liquid medicine sensor is damaged.
Investigation steps and handling methods
(1) Carry out network health diagnosis to ensure that the network is smooth and the network delay is normal.
(2) Check whether the float is above the liquid level and whether it will change with the change of the liquid level.
(3) Add proper amount of water according to App prompts, not too much or too little.
(4) Place that agricultural drone on the level ground to recalibrate.
(5) Ensure that the peristaltic pump, nozzle and shut-off valve work normally.
(6) It is recommended to calibrate with clean water.
(7) Make sure that the pipeline is not damaged, the connection is not loose, and the medicine box mouth is tightened.
(8) Add water to confirm whether the dosage of App will change. If not, replace the medicine box sensor.
Spraying System offline
Phenomenon description: "XAG One" App prompts the Spraying System to be offline.
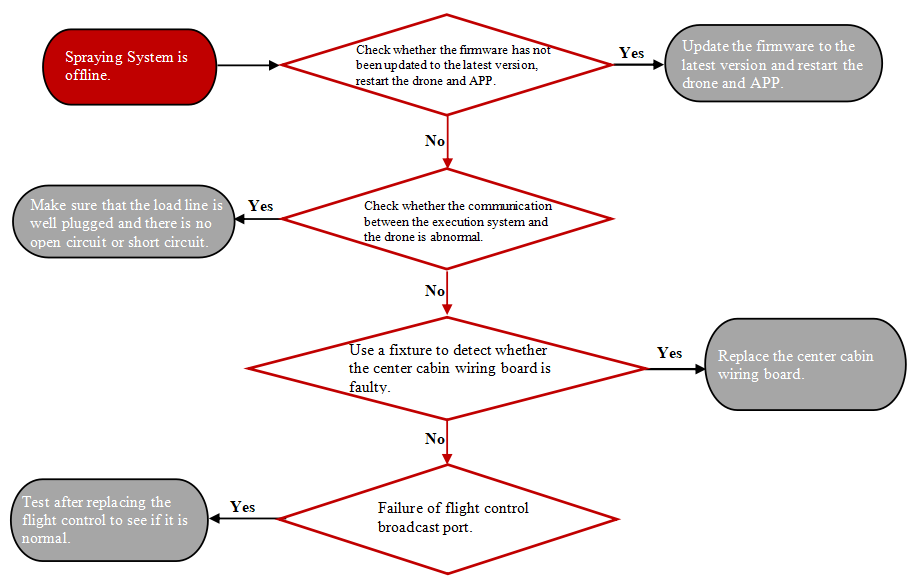
Cause analysis
(1) The firmware is not updated to the latest version, and the system is not online.
(2) The communication between the executive system and the agricultural drone is abnormal.
(3) Fault occurs to the central cabin wiring board.
(4) Failure of flight control.
Investigation steps and handling methods
(1) Ensure that the load line is well connected without open circuit or short circuit.
(2) Check whether there is any damage to the central cabin wiring board.
(3) Restart agricultural drone and App.
(4) Replace the flight control.
Inaccurate flow and large error
Phenomenon description: The actual spraying flow is seriously inconsistent with the set flow of App, and the error is too large.
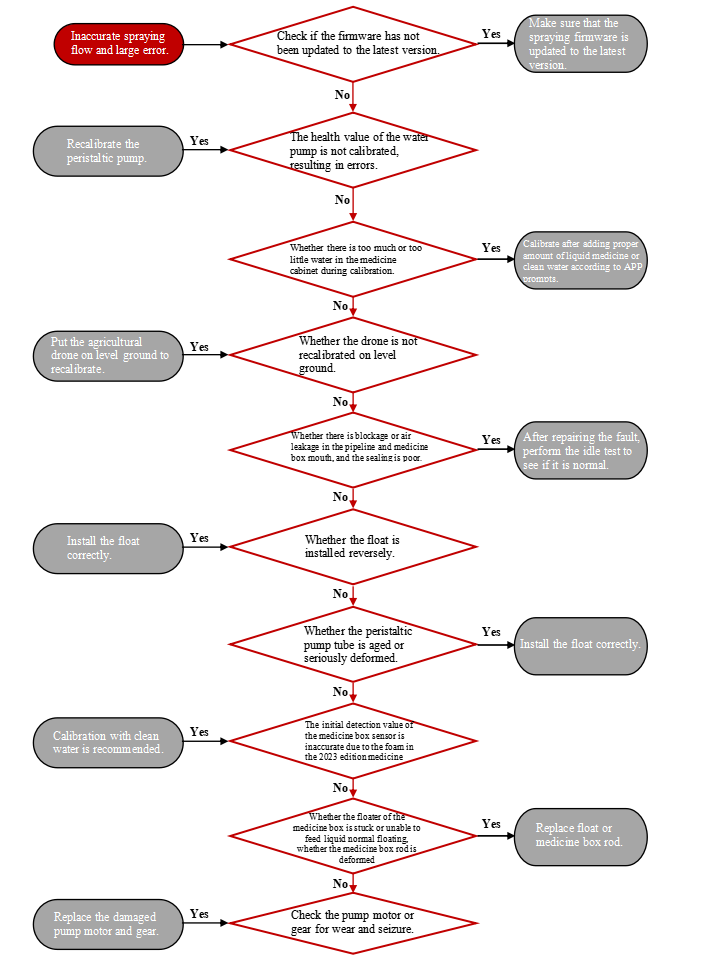
Cause analysis
(1) The firmware is not updated to the latest version, and the error is caused by the firmware problem.
(2) The water pump is not calibrated, resulting in errors.
(3) The pipeline and medicine box nozzle are blocked or leaked, and the sealing performance is poor.
(4) The initial detection value of the medicine box sensor is not accurate because the medicine box float cannot float normally.
(5) The initial detection value of the medicine box sensor is inaccurate due to the foam in the 2023 edition medicine boxes.
(6) The peristaltic pump tube has been used for a long time, aging or serious deformation.
(7) The float is installed reversely after reassembly.
(8) The water pump motor or gear is damaged, resulting in speed error.
Investigation steps and handling methods
(1) View the firmware version on the App to see if it is necessary to upgrade the relevant firmware of the Spraying System.
(2) Calibrate the water pump according to the steps. After calibration, test whether the flow is accurate (a certain range of error is allowed).
(3) Check whether the whole spraying pipeline and medicine box nozzle are cracked, leaked, worn and blocked.
(4) Check whether the floater of the medicine box is stuck, the liquid inlet cannot float normally, and whether the medicine box rod is deformed.
(5) Use filter bag or dosing gun to reduce the foam generated by dosing.
(6) The water pump pipe has been used for a long time, aged or deformed, and needs to be replaced with a new peristaltic pipe.
(7) Check whether the float is installed reversely. The float of P100 is blue upward/the float of P80 upgraded version is blue downward.
(8) Check whether the water pump motor or gear is worn or jammed.
Unstable spraying route
Phenomenon description: Uneven spraying of water mist can be clearly seen during the agricultural drones flight operation according to the route.
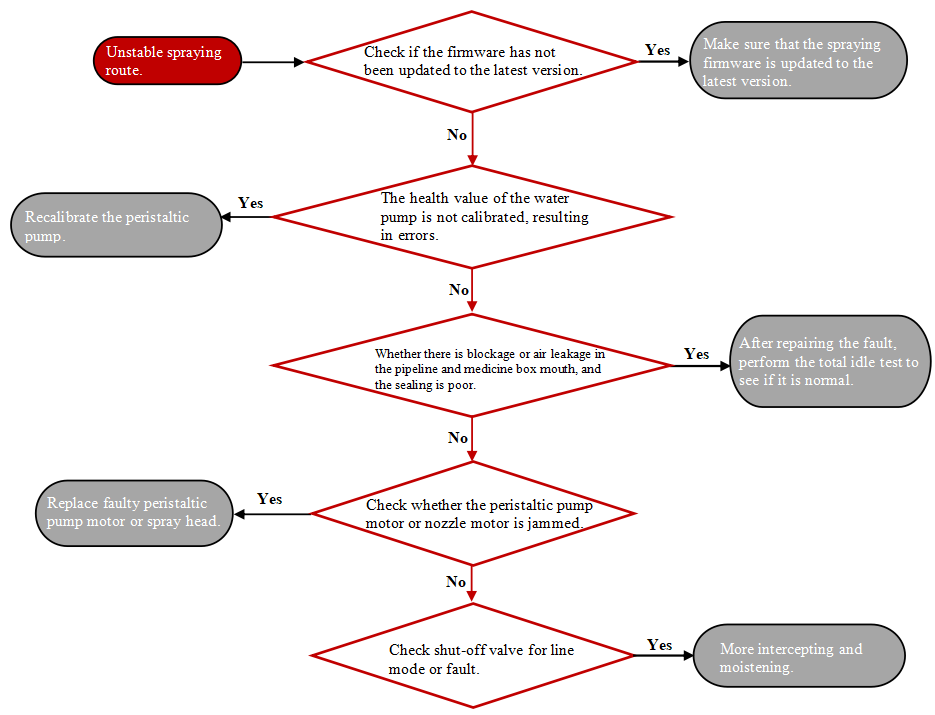
Cause analysis
(1) Agricultural drone firmware is not updated to the latest version.
(2) The pipeline and medicine box nozzle are blocked or leaked, and the sealing performance is poor.
(3) The peristaltic pump or nozzle motor is abnormal.
(4) Shut-off valve failure.
Investigation steps and handling methods
(1) Check if the spray firmware is the latest version.
(2) Check whether the whole spraying pipeline and medicine box nozzle are cracked, leaked, worn and blocked.
(3) Replace with a new nozzle motor or peristaltic pump, and manually test to see if it is normal.
(4) Replace the shutoff valve with a new one and manually test it to see if it is normal.
Medicine boxoffline
Phenomenon description: "XAG One" App prompts the intelligent medicine box to be offline.
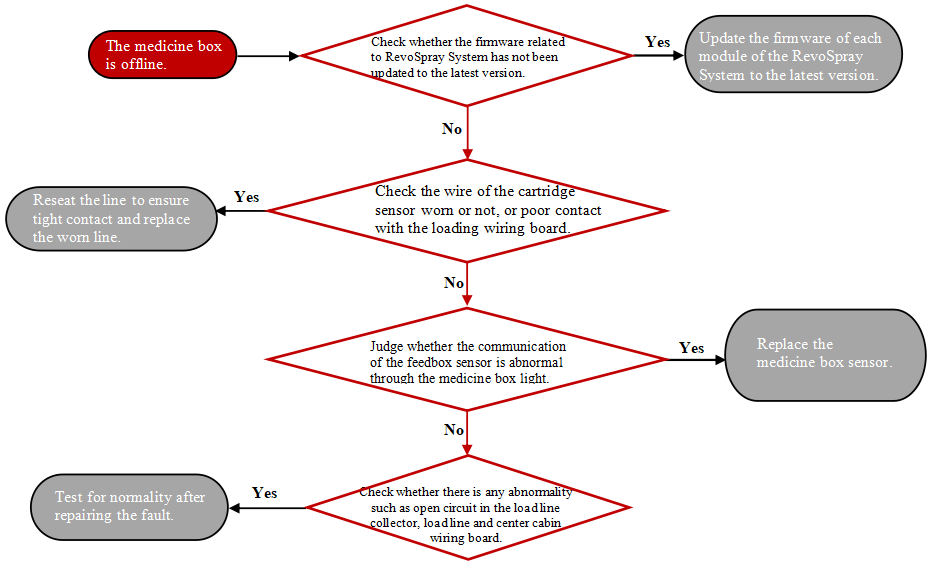
Cause analysis
(1) The firmware is not updated to the latest version.
(2) The communication between the medicine box sensor and the loading wiring board is abnormal.
(3) Abnormal medicine box sensor.
Investigation steps and handling methods
(1) Update the relevant firmware to the latest version.
(2) Check whether the medicine box sensor and the loading wiring board are well connected, and whether they are damaged or disconnected.
(3) Observe whether the medicine box light has a green light flashing or on. If the light is not on, it indicates that the power supply of the medicine box sensor is abnormal.If the green light is on, it means that the medicine box cannot communicate with the Spraying System, and need to contact the service station to replace the medicine box sensor.
(4) If the green light is still on and not online after replacing the medicine box sensor, check or replace the load line and loading wiring board.
Abnormal speed (current) of nozzle motor
Phenomenon description: "XAG One" App prompts that the motor speed (current) of the nozzle is abnormal.
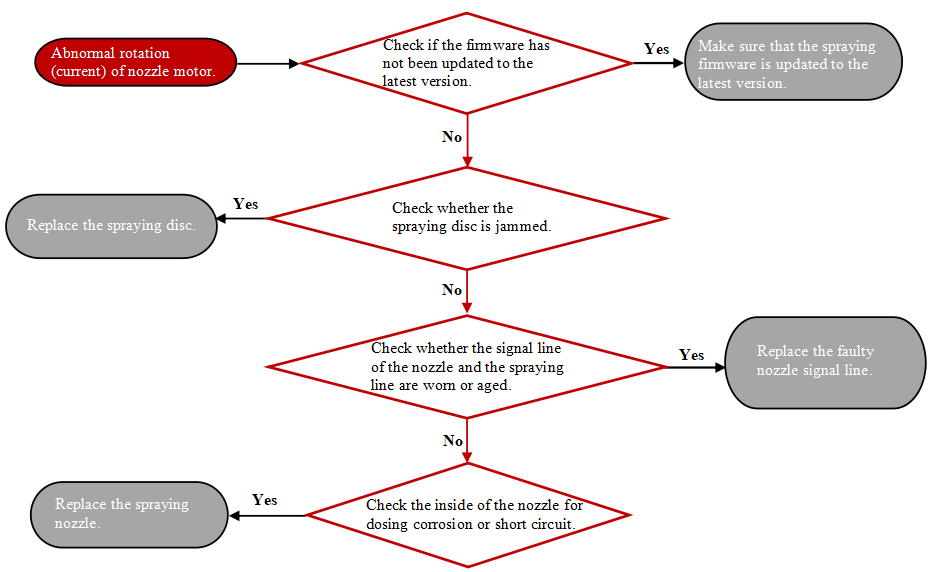
Cause analysis
(1) The firmware is not updated to the latest version.
(2) The spraying signal line or spraying line is worn or aged, or the spraying disc is stuck.
(3) The inside of the nozzle is corroded or short-circuited.
Investigation steps and handling methods
(1) Make sure that the relevant firmware for spraying is updated to the latest version.
(2) Rotate the spraying disc by hand to see if there is any jamming or obvious resistance.
(3) Check whether the signal line and spraying line of the nozzle are worn or aged.
(4) Exchange the two sides to check whether are normal. If not, try to replace the motor with a new one.
Pump motor speed (current) abnormal
Phenomenon description: "XAG One" App indicates that the water pump speed (current) is abnormal.
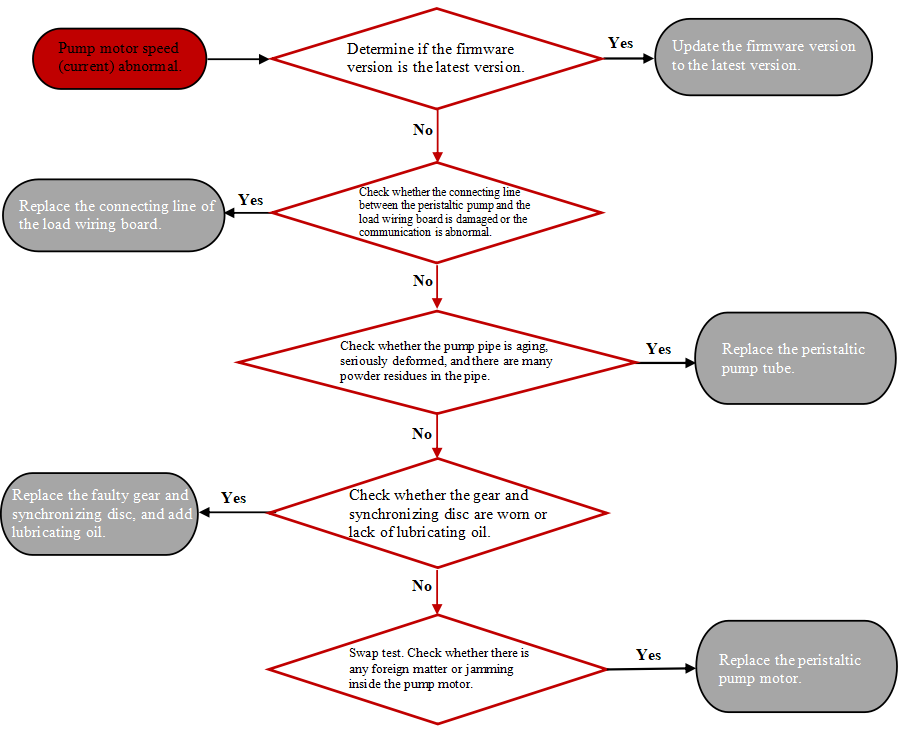
Cause analysis
(1) The firmware is not updated to the latest version.
(2) The connecting line between the peristaltic pump and the load wiring board is damaged and the communication is abnormal.
(3) The aging and serious deformation of the pump pipe lead to large hardening resistance or large stress fluctuation.
(4) The liquid medicine in the pump pipe is dry, and the resistance caused by the residual powder is large.
(5) The gear and synchronizing disc are worn or the lubricating oil is insufficient.
(6) There is foreign matter inside the pump motor, and it is stuck.
Investigation steps and handling methods
(1) Check if the firmware is updated to the latest version.
(2) Check whether the connecting line from the load wiring board to the water pump is in good condition.
(3) Replace the pump tube which is aging, serious deformation and have residual powder.
(4) Check whether the gear and synchronous disc are worn and whether the lubricating oil is missing.
(5) Replace the peristaltic pump motor.
Nozzle motor is offline
Phenomenon description: "XAG One" App prompts the nozzle motor to be offline.
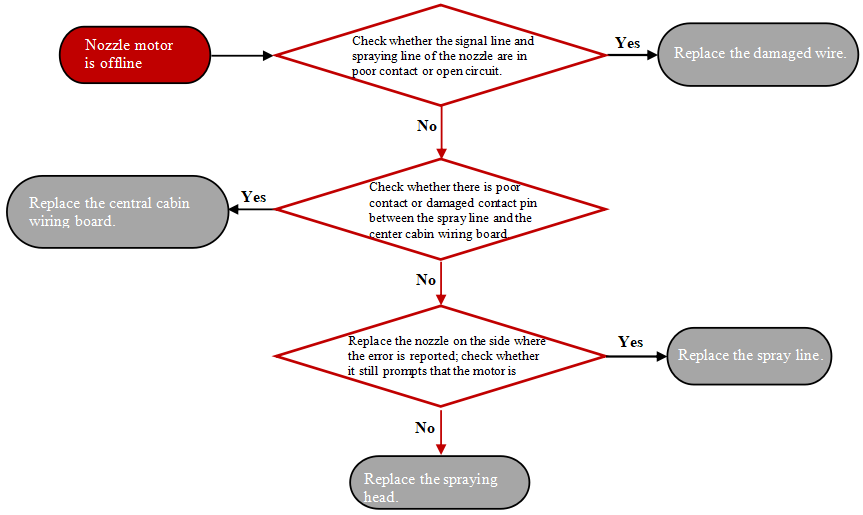
Cause analysis
(1) Sprinkler signal line and spraying line are in poor contact or disconnected.
(2) Poor contact or damage between the spraying line and the central cafeedbox wiring board.
(3) Nozzle motor is damaged.
Investigation steps and handling methods
(1) Check the communication condition of the nozzle signal line and the spraying line for poor connection or open circuit.
(2) The motor on one side can be replaced. If it is still prompted that the motor is offline, it should be the problem of the connecting line. If it is normal, it should be the problem of the motor.
Water pump motor is offline
Phenomenon description: "XAG One" App prompts that the water pump motor is offline.
Cause analysis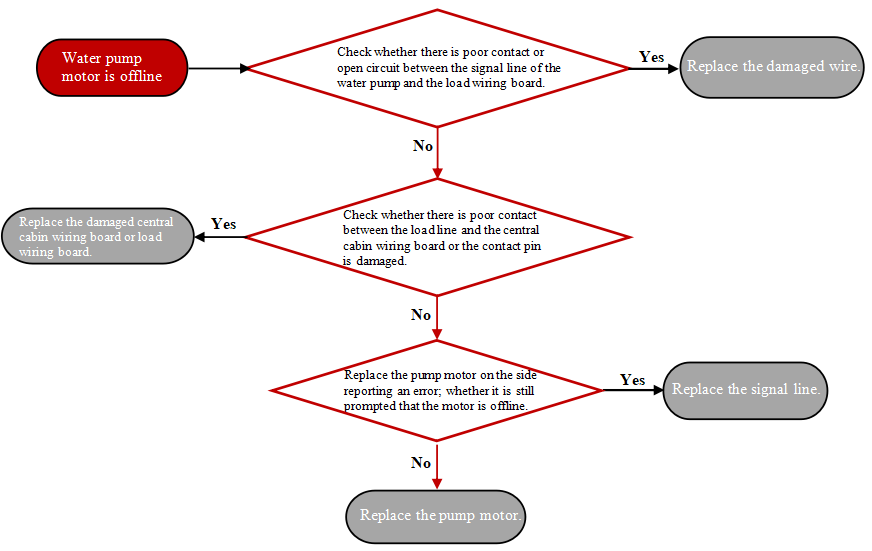
(1) Poor contact of water pump signal line.
(2) The load line is in poor contact with the load wiring board and the center cafeedbox wiring board.
(3) The circuit board inside the water pump is damaged.
Investigation steps and handling methods
(1) Check whether there is poor connection between the water pump and the load wiring board and the collecting board.
(2) When prompting the S1 water pump to be offline, exchange the signal lines. When prompting S2 to be offline, replace the water pump motor. Still prompting S1 to be offline, check the signal line.
Sub-module mismatch
Phenomenon description: During the spraying operation, "XAG One" App reports the errors on mismatch of sub-module.
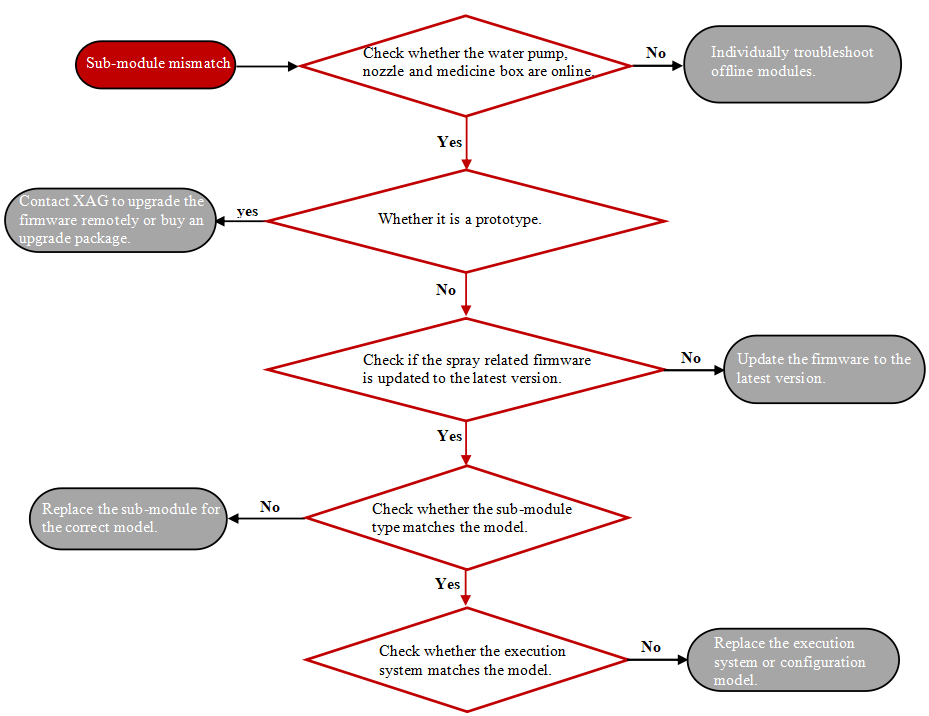
Cause analysis
(1) Sub-module (water pump, nozzle, medicine box sensor) is offline.
(2) The P100 Pro prototype does not upgrade the 11 L water pump package.
(3) The spray related firmware does not updated to the latest version.
(4) The sub-module does not match the model.
(5) Model information does not match.
Investigation steps and handling methods
(1) Check the offline sub-modules separately to ensure that the sub-modules are online.
(2) The P100 Pro prototype (coding begin with 82162) needs to share the equipment to XAG, upgrade the firmware of the test service and execute the system service 3.0.0.30, Margin sensor 2.0.1.15 or 2.0.1.19. The V50 Pro prototype needs to share the equipment to XAG, upgrade the test service firmware execution service 3.1.1.23, then switch back to the official service to upgrade the latest version of the execution service 3.1.0.X.
(3) Update the relevant firmware of spray to the latest version and unify the version of spraying ESC.
(4) Query the sub-module type through XAG cloud to ensure that the pump type corresponding to 22 modules / 23 edition V50 /23 edition P100 is the 22 edition 6L pumps.The 23 edition V50 Pro pumps correspond to 23 edition 6L pumps, and the 23 edition P100 Pro pumps correspond to 23 edition 11L pumps. Nozzle type 5; 22 edition is intelligent medicine box firmware, 23 edition is surplus material sensor firmware.
(5) Check whether the drone model matches with the execution system. If the drone model does not match, it is necessary to configure the model. If the execution system does not match, the matching execution system shall be replaced. In the current firmware version, the flight control firmware beginning with 1 represents the P series; in the current firmware version, the flight control firmware beginning with 6 represents the V series. If it is inconsistent with the actual model,the "XAG One" App needs to be used for model configuration. The execution system can be judged by the box nameplate or the firmware version of the sub-module.
RevoCast system
RevoCast system calibration fails
Phenomenon description: The RevoCast system is connected to the flight control through the PLD signal line, and the load wiring board provides power to the RevoCast system.When we calibrate RevoCast through "XAG One" App, the appearance of the calibration failure means that the calibration of RevoCast has not been completed.
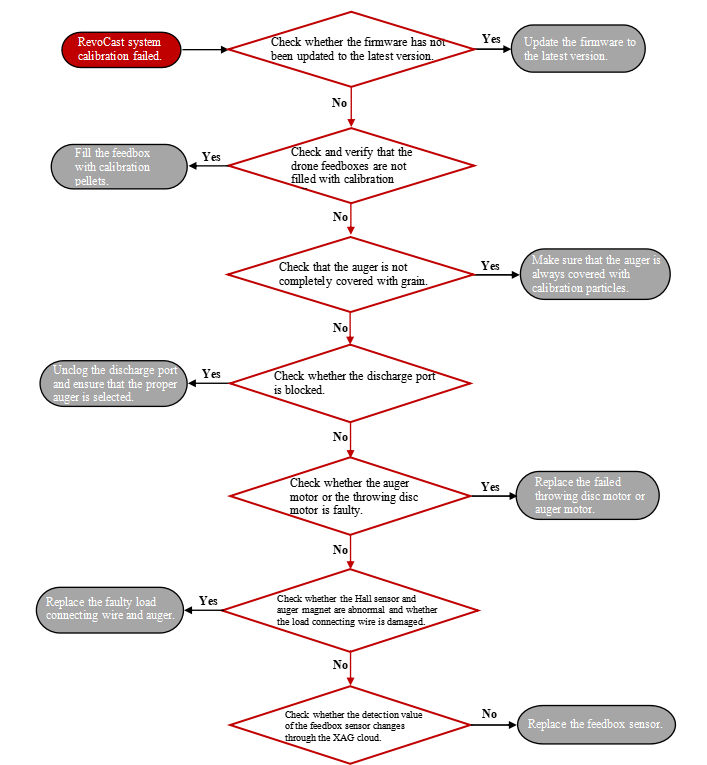
Cause analysis
(1) The firmware has not been upgraded to the latest version.
(2) Insufficient loading of calibration particles in the feedbox.
(3) The auger is not completely covered with calibration particles.
(4) The discharge port is blocked.
(5) Fault of Auger motor or swing disc motor.
(6) The Hall sensor and Auger magnet are abnormal, and the load connecting wire is damaged.
(7) Feedbox sensor failure
Investigation steps and handling methods
(1) Check the firmware, open the "XAG One" App, check whether there is the latest firmware, if so, upgrade the device firmware to the latest version.
(2) Check and verify that the agricultural drone feedboxes are filled with calibration pellets.
(3) Check whether the auger is always covered with calibration particles during calibration.
(4) Conduct manual seeding test to ensure that the discharge port is not blocked and the auger is selected correctly.
(5) Conduct manual seeding test to check whether the throwing disc motor and auger motor work normally.
(6) Check whether the auger magnet is demagnetized or lost, whether the Hall sensor is faulty, and whether the load cable is damaged.
(7) Check whether the detection value of the feedbox sensor will change through the polar flying cloud. If not, replace the feedbox sensor.
RevoCast system Offline/Execution System Identification Error
Phenomenon description: The RevoCast system is connected to the flight control through the PLD signal line, and the power is supplied to each module of RevoCast by the load wiring board.During the task execution, the flight control sends a control command to the RevoCast system, and if the RevoCast system does not respond after the flight control command is sent, indicates that the RevoCast system is offline or not connected.
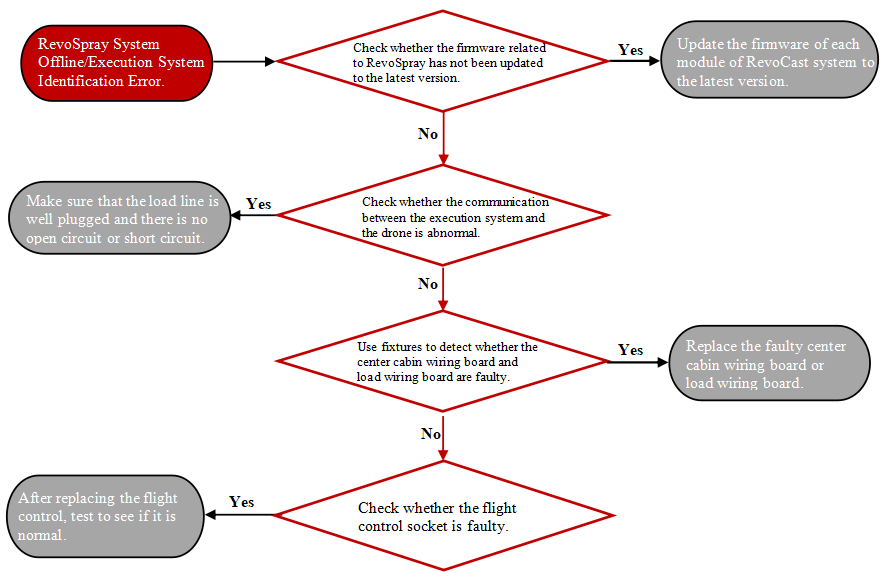
Cause analysis
(1) The firmware is not updated to the latest version.
(2) The communication between the executive system and the agricultural drone is abnormal.
(3) Central cabin wiring board or load wiring board.
(4) Failure of flight control.
Investigation steps and handling methods
(1) Check whether the firmware has not been updated to the latest version, and restart the agricultural drone and App.
(2) Check whether the load line is forgotten to be plugged and whether there is open circuit or short circuit.
(3) Check whether there is any damage to the central cabin wiring board.
(4) Replace the flight control.
Abnormal speed (current) of Auger motor
Phenomenon description: under normal conditions, the flight control system passes through the central cabin wiring board and the load wiring board in turn.Send the control signal to the Auger electric regulating board and receive the control,the Auger electric adjusting board after the signal can output a command to control the Auger motor to rotate, and when the current of the Auger motor is abnormal, which indicates that the Auger motor module has failed.
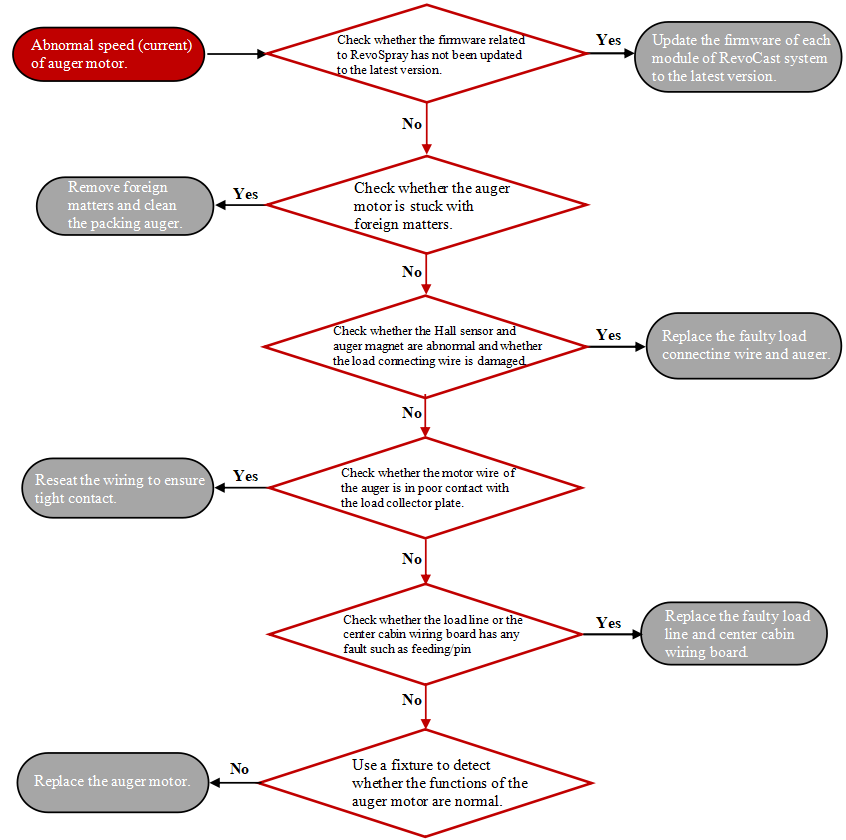
Cause analysis
(1) The firmware is not updated to the latest version.
(2) The Auger motor is stuck with foreign matters.
(3) The Hall sensor and Auger magnet are abnormal, and the load connecting wire is damaged.
(4) The motor wire of the Auger is in poor contact with the load collector.
(5) Fault of load line or center cabin wiring board.
(6) The Auger motor fails.
Investigation steps and handling methods
(1) Confirm that the firmware of each module of RevoCast system has been updated to the latest version.
(2) Check whether the Auger motor is jammed or there are foreign matters inside.
(3) Check whether the Auger magnet is demagnetized or lost, whether the Hall sensor is faulty, and whether the load cable is damaged.
(4) Confirm that the Auger motor wire is well connected with the load wiring board, and there is no damage.
(5) Make sure that the load line is not damaged, and the pin of the central cabin wiring board is in good condition without deformation.
(6) If no abnormality is found in the above inspection and the Auger motor current is continuously abnormal, replace the Auger motor with a new one.
Feedbox sensor is offline
Phenomenon description: The feedbox sensor is responsible for detecting the remaining amount of material in the feedbox, which is powered by the load wiring board.The communication with the flight control is realized through the load wiring board,If the Feedbox sensor is offline, it means that the flight control fails to read the material quantity information in the feedbox of the RevoCast system.
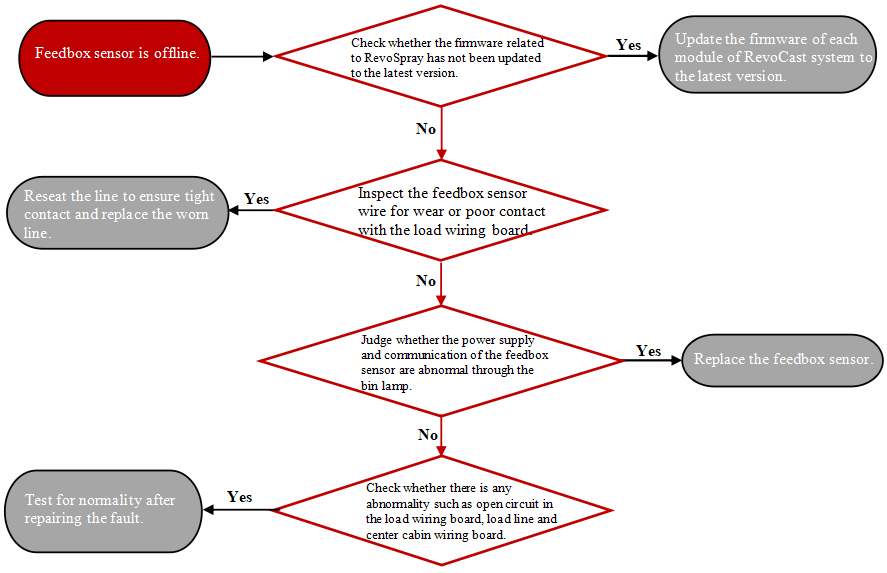
Cause analysis
(1) The firmware is not updated to the latest version.
(2) The wire of the Feedbox sensor is worn or in poor contact with the load wiring board.
(3) The Feedbox sensor or the load line is damaged.
(4) Fault of load line or center cabin wiring board.
Investigation steps and handling methods
(1) Confirm that the firmware of each module of RevoCast system has been updated to the latest version.
(2) First check whether the wire of the Feedbox sensor is in good condition, and then check whether the Feedbox sensor and the load wiring board are well connected.
(3) Update the RevoCast system firmware to the latest version, and observe whether the green light of the Feedbox sensor flashes.If it does not flash, it indicates that the power supply of the Feedbox sensor is abnormal; if the green light is always on, it indicates that the power supply of the Feedbox sensor is normal. There is a small light inside the Feedbox sensor, in which the red light flashes to indicate that the communication is offline, and the yellow light flashes to indicate that the communication is online.The Feedbox sensor can be replaced when the power supply of the Feedbox sensor is abnormal or the communication is offline.
(4) When the power supply is still abnormal or the communication is offline after the Feedbox sensor is replaced, it is necessary to check or replace the load wiring board, load line and center cabin wiring board.
Abnormal rotation speed (current) of throwing disc motor
Phenomenon description: The flight control sends the control signal to the electric control of the throwing disk through the center cabin wiring board and the load wiring board in turn. After receiving the control signal, the disk electric control outputs a command to control the disk motor, and when the rotation speed/current of the disk motor is abnormal, it indicates that the motor of the swing disk is in an abnormal state.
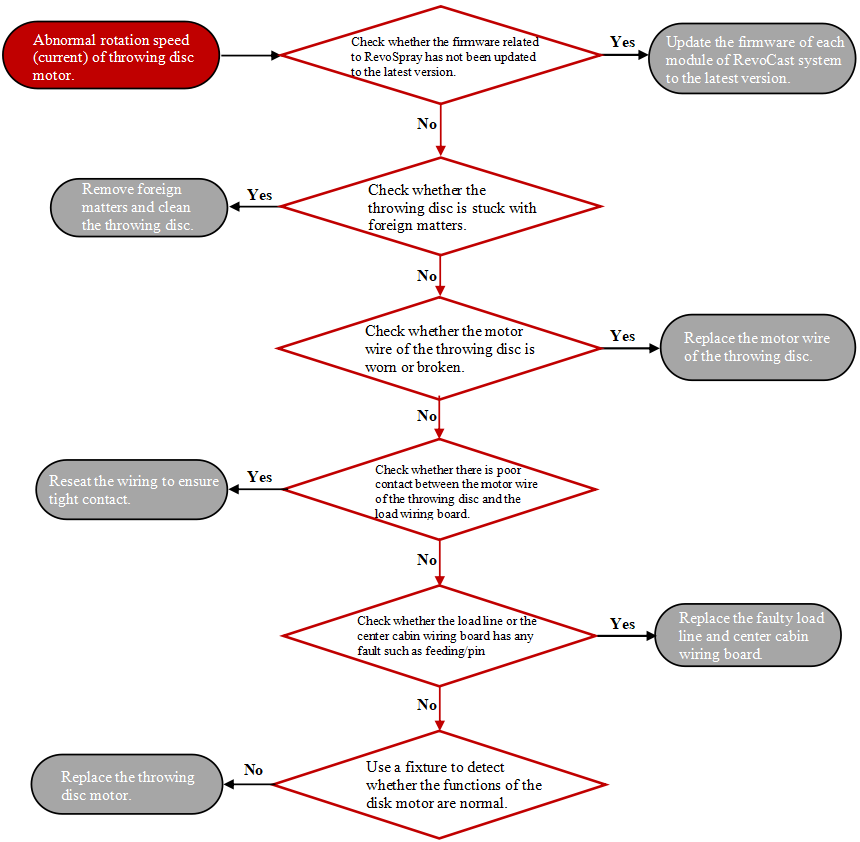
Cause analysis
(1) The disk motor firmware is not updated to the latest version.
(2) The rotating disc is stuck by foreign matters, which affects the rotating speed.
(3) Abnormal motor wire of disc throwing.
(4) Poor contact between the motor wire and the load wiring board.
(5) Fault of load line or center cabin wiring board.
(6) The motor of the swing disc motor is faulty.
Investigation steps and handling methods
(1) Confirm that the firmware of each module of RevoCast system has been updated to the latest version.
(2) Check whether there is foreign matter stuck on the swing plate, and clean the foreign matter on the swing plate.
(3) Check whether the motor wire is in good condition without damage.
(4) Confirm that the motor wire of the reel is well connected with the load wiring board, and there is no damage.
(5) Make sure that the load line is not damaged, and the pin of the central cabin wiring board is in good condition without deformation.
(6) If the above steps fail to solve the problem of abnormal rotation speed (current) of the disk motor, replace the disk motor with a new one.
The Auger motor is offline
Phenomenon description: The Auger motor is connected to the flight control through the load wiring collection board and the center cabin wiring board. When the Auger motor is controlled to rotate, the flight control transmits the control signal to the load wiring board, and the Auger electric regulating board receiving the control signal outputs a command to drive the Auger motor.And feed back information to the flight control.When the power supply is started, the software displays that the Auger motor is offline and there is no response, indicating that the Auger motor is offline at this time.
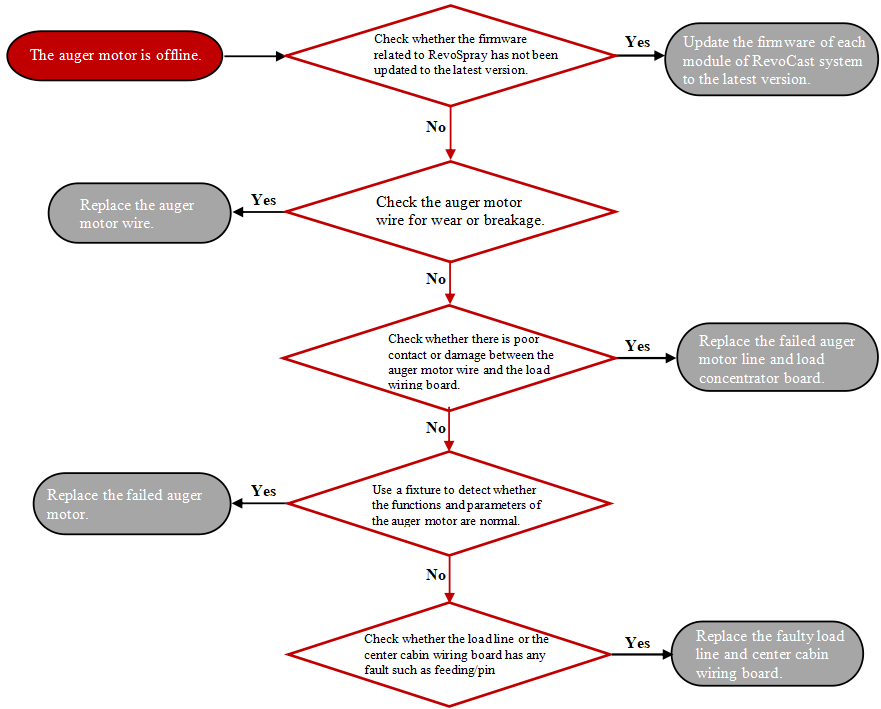
Cause analysis
(1) The device firmware is not updated to the latest version.
(2) The Auger motor wire is damaged.
(3) The motor line of the Auger is in poor contact with the load wiring board or damaged.
(4) Fault of Auger motor.
(5) Fault of load line or center cabin wiring board.
Investigation steps and handling methods
(1) Confirm that the firmware of each module of RevoCast system has been updated to the latest version.
(2) Check whether the motor wire of the Auger is in good condition without damage.
(3) Confirm that the Auger motor wire is well connected with the load wiring board, and there is no damage.
(4) Use the jig to check whether the functions and parameters of the Auger motor are normal.
(5) Make sure that the load line is not damaged, and the pin of the central cabin wiring board is in good condition without deformation.
Throwing disc motor offline
Phenomenon description: The motor of the swing disk is connected with the flight control through the load wiring board and the central cabin wiring board. When the motor of the swing disk is controlled to rotate, the flight control transmits the control signal to the load wiring board, receives the output instruction of the disk electric adjusting board of the control signal, drives the disk motor, and feedback information to the flight control. When the power supply is started, the software displays that the disk motor is offline and there is no response, indicating that the disk motor is offline at this time.
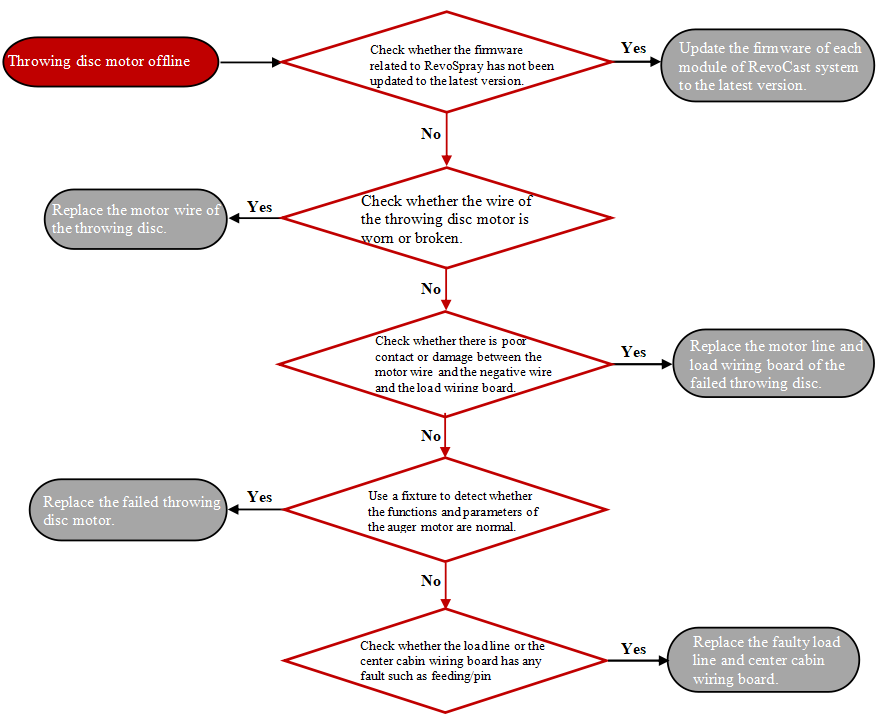
Cause analysis
(1) The device firmware is not updated to the latest version.
(2) The motor wire of the swing disc is damaged.
(3) Poor contact or damage between the motor wire and the load wiring board.
(4) The motor of the swing disc motor is faulty.
(5) Fault of load line or center cabin wiring board.
Investigation steps and handling methods
(1) Confirm that the firmware of each module of RevoCast system has been updated to the latest version.
(2) Check whether the motor wire is in good condition without damage.
(3) Confirm that the motor wire of the reel is well connected with the load wiring board, and there is no damage.
(4) Use the jig to check whether the functions and parameters of the motor are normal.
(5) Make sure that the load line is not damaged, and the pin of the central cabin wiring board is in good condition without deformation.
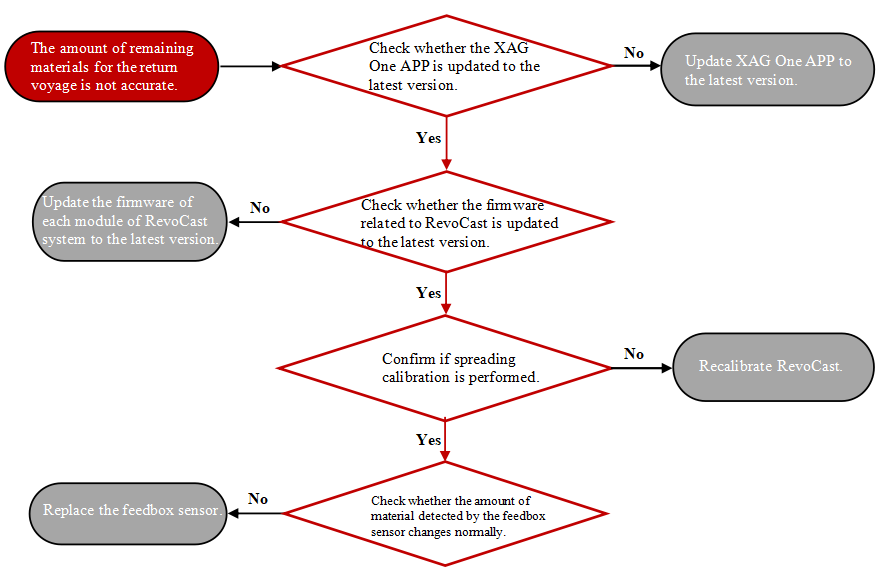
The amount of remaining materials for the return voyage is not accurate
Phenomenon description: The remaining amount in the feedbox is detected by the Feedbox sensor. The seeding calibration must be carried out after the first use of the RevoCast System or the replacement of new seeding particles and different types of Augers. When the operation of the agricultural drone is finished, the remaining amount of the material in the material box is observed. It was found that there was a serious discrepancy between the amount of residual material in the return flight and the theoretical seeding amount, indicating that the detection of residual material in the Feedbox sensor was not accurate.
Cause analysis
(1) App software of "XAG One" has not been updated to the latest version.
(2) The device firmware is not updated to the latest version.
(3) Calibration is not completed when the RevoCast system is used for the first time or a new seeding particle or Auger is replaced.
(4) The Feedbox sensor is faulty.
Investigation steps and handling methods
(1) Check the App software of "XAG One" and confirm that it is the latest version.
(2) Confirm that the firmware of each module of RevoCast system has been updated to the latest version.
(3) For the first use of RevoCast or new sowing particles and Augers, RevoCast shall be re-calibrated.
(4) After the above steps are checked, if the remaining material quantity is still inaccurate, replace the Feedbox sensor with a new one.
Submodule mismatch
Phenomenon description: During the seeding operation, "XAG One" App reports that the error sub-module does not match.

Cause analysis
(1) Sub-module (Auger motor, Throwing disc motor, Feedbox sensor) is offline.
(2) Firmware related to seeding is not updated to the latest version.
(3) The submodule does not match the model.
(4) Model information does not match.
Investigation steps and handling methods
(1) Check the offline sub-modules separately to ensure that the sub-modules are online.
(2) Update the relevant firmware of spraying to the latest version and unify the version of the spreading ESC.
(3) Query the sub-module type through XAG cloud to ensure that the Auger type of 22 edition P series models is 0 or 2;The Auger type of 22 edition V-series models is 0 or 3; the Auger type of 23 edition P-series models is 12;The Auger type of 23 edition V-series models is 3; the firmware of 22 edition intelligent feedboxes, and the firmware of 23 edition residual material sensors.
(4) Check whether the drone model is matched with the execution system. If the drone model is not matched, it is necessary to configure the model.The execution system does not match, and the matching execution system shall be replaced. In the current firmware version, the flight control firmware beginning with 1 represents the P series. In the current firmware version, the flight control firmware beginning with 6 represents the V series. If it is inconsistent with the actual model,the "Extreme Plus Overhaul" App needs to be used for model configuration. The execution system can be judged by the box nameplate or the firmware version of the submodule.
RealTerrasystem
RealTerra camera is abnormal
Phenomenon description: In the process of farmland mapping with RealTerra camera, RealTerra camera is abnormal.At this time, the communication between RealTerra camera and RealTerrais in a disconnected state, and the normal mapping operation of RealTerracan not be carried out.
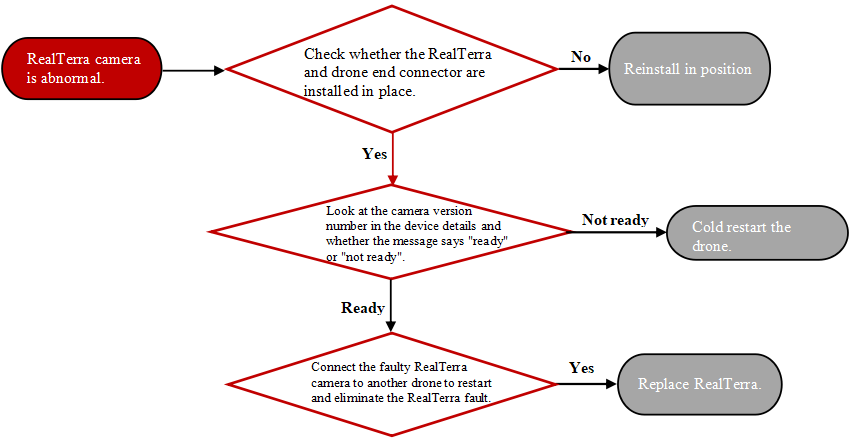
Cause analysis
(1) The joint between RealTerraand agricultural drone is not installed in place.
(2) RealTerra camera is faulty or RealTerra is damaged (the camera cannot communicate with RealTerra).
Investigation steps and handling methods
(1) Check whether the end connector of RealTerra and agricultural drone is installed in place to ensure that the connector is installed in place.
(2) Look at the camera version number in the device details and whether the message prompts "Ready" or "Not Ready".If it is "not ready", it is suggested to restart the agricultural drone.
(3) If the above operations are still invalid, the faulty RealTerra camera will be connected to another agricultural drone to restart.Troubleshoot the RealTerra.
(4) After the above steps are checked, if the RealTerra camera is still abnormal, replace it with a new one.
Execute the task, App prompt error "Job mount mechanism not detected"
Phenomenon description: During the aerial survey task, "XAG One" reports an error message, which is displayed as "No operation mounting mechanism is detected".
Cause analysis
(1) The connection terminals (a, B and C) are abnormal, and the abnormal status is as follows:
a. The flight control LAN line and the central cabin wiring board are damaged.
b. The 12pin load line of the upper body and the central cabin wiring board are damaged.
c. The 12pin load line of the upper body and the terminals of the RealTerra module are damaged.
Investigation steps and handling methods
(1) After the butt connector is plugged out, inspect it with a magnifying glass or with naked eyes under a flashlight. If the male end or female end is damaged, the corresponding wire needs to be replaced.
(2) Fix the 12pin load line of the upper body with the terminal of the RealTerra module (see the figure for the detailed process).
| Series | Operation | illustration | A bill of material is involved |
P100_ RealTerra | 1. Fix the load connecting line connector clamp at the bottom of the load frame with screws (as shown in Figure ①).
2. Remove the load main frame wire fastener screw, and connect the load main frame wire fastener and the RealTerra module wire.Finally, fix the RealTerra and place it in the fixing groove, and lock the load main frame wire buckle with the screw (as shown in Fig. ②);(The length of the wire buckle from the outgoing end of the RealTerra module to the main frame of this load shall be redundant and shall not be tightened)
3. Connect the RealTerra module connecting line with the 12pin mounting connecting line, and clamp the fixed line end into the load connecting line connector; |
| 1. 02-001-08110 _ load connecting wire connector clamp (A2) * 1 2. 02-004-00918 _ ST4.2 * 8 Hexagon socket head flat tail tapping screw * 2 3. 02-001-00299 wire tie * 1 |
V50_RealTerra | 1. Temporary scheme: fix the connecting line of RealTerra module on the side of the shock absorber bracket with a wire tie (as shown in the figure ①), and cut down the excess length of the wire tie.
2. Long-term plan: to be updated. |
| 1, 1, 02-001-00299 wire tie * 1 |



RealTerra algorithm is abnormal
Phenomenon description: Start the RealTerra camera, and use the RealTerra camera to carry out the farmland mapping process or the mapping task is in progress or the mapping task is over. RealTerra data is unavailable
A failure condition has occurred in the solution or during the solution.
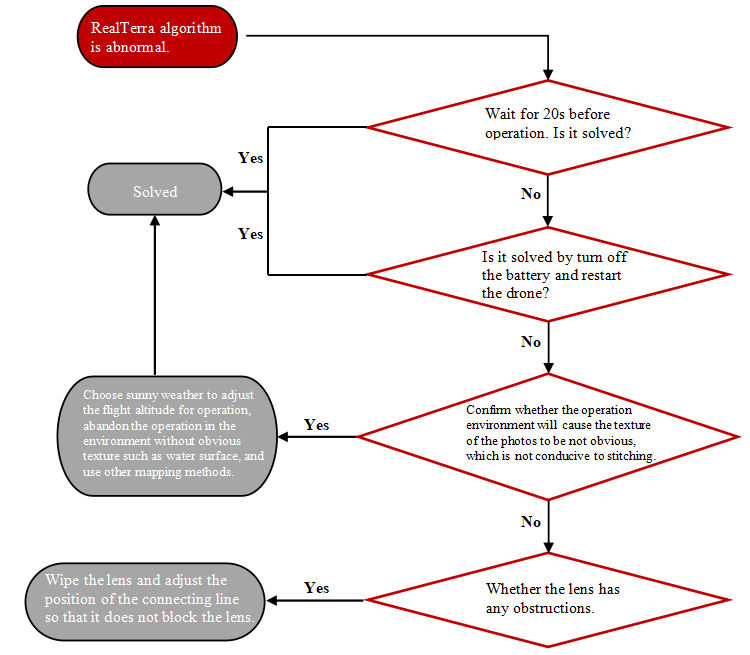
Cause analysis
(1) The algorithm is not in place and the user has made an operation (at the initial stage of startup).
(2) In the mapping process of RealTerra, the ambient wind speed is too high, causing serious camera shake.
(3) The shooting environment is dim, the brightness is insufficient, or there is rain, snow, haze and other weather that blocks the imaging.
(4) The shooting scene is not rich in texture features, such as desert, water and other scenes that are not rich in texture features.
(5) The shooting lens is dirty and the photos are incomplete, which makes it impossible to solve the problem.
(6) The shooting lens range is blocked (such as connecting lines), and the photos are incomplete.
Investigation steps and handling methods
(1) Wait for 20 seconds and then operate. If it still does not work, turn off the battery and restart the agricultural drone.
(2) Pay attention to the wind speed of the flight environment, avoid the windy weather, and carry out the mapping task after the wind speed is reduced.
(3) Choose the day or the weather with good light brightness, avoid cloudy days, dark time, sunrise and sunset. RealTerra aerial survey is carried out in scenes without rich texture features, avoiding water surface, desert and other environmental operations without obvious texture features.
(4) Wipe the lens with a clean dust-free cloth to ensure that the camera is clean and free of debris.
(5) Check whether the connecting line blocks the lens and adjust the hanging position of the connecting line.
High-precision image composition failed
Phenomenon description: Use the RealTerra camera to carry out the farmland mapping task. After the aerial survey task is completed, the picture data taken by RealTerra is unable to complete the merging of high precision images. App prompts that the synthesis of high precision images fails.
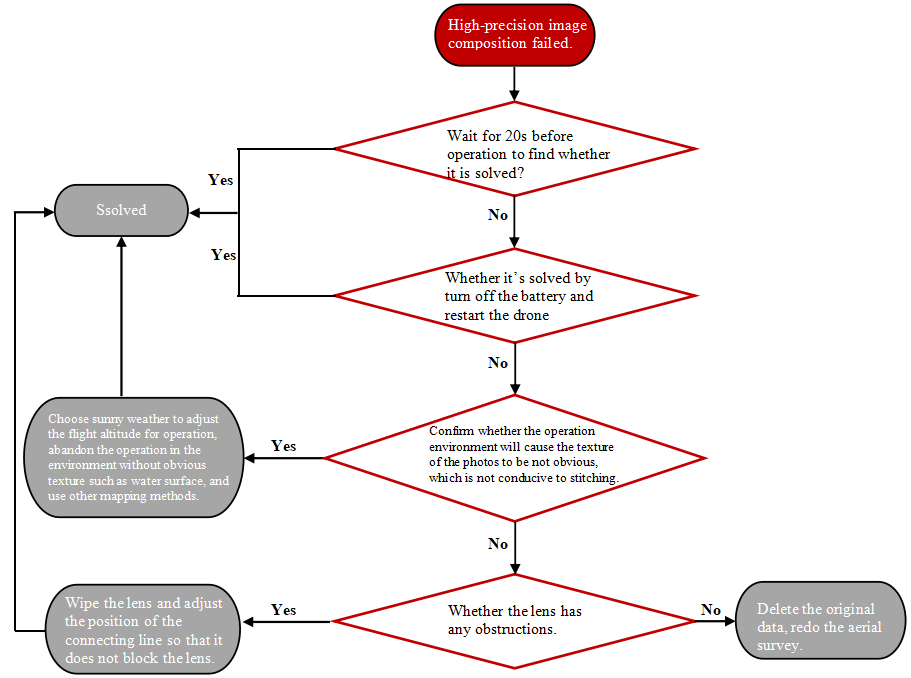
Cause analysis
(1) In the process of mapping, the ambient wind speed is too large, and the body vibration is too large, which causes serious camera shake.
(2) The shooting environment is dim, the brightness is insufficient, or there is rain, snow, haze and other weather that blocks the imaging.
(3) The texture features of the shooting scene are not rich, such as the use of RealTerra in desert, water and other scenes.
(4) The shooting lens is dirty and the photos are incomplete, which makes it impossible to solve the problem.
(5) The shooting lens range is blocked (such as connecting lines), and the photos are incomplete.
Investigation steps and handling methods
(1) Pay attention to the wind speed of the flight environment, avoid the windy weather, check the structural parts of the airframe, and carry out the mapping task after the wind speed is reduced.
(2) Choose the day or the weather with good light brightness, avoid cloudy days, dark time, sunrise and sunset.RealTerraaerial survey is carried out in scenes without rich texture features, avoiding water surface, desert and other environmental operations without obvious texture features.
(3) Wipe the lens with a clean dust-free cloth to ensure that the camera is clean and free of debris.
(4) Check whether the connecting line blocks the lens and adjust the hanging position of the connecting line.
(5) Collaborate with that operation condition above, if the high-precision map display synthesis fails, delete the original data, and carrying out aerial survey on the farmland again.
High-precision image blurring
Phenomenon description: RealTerra camera is used for farmland surveying and mapping tasks. After RealTerra aerial survey data has been calculated and merged, the map data of the photographed field texture is blurred, and the texture of the high-definition map is not clear.
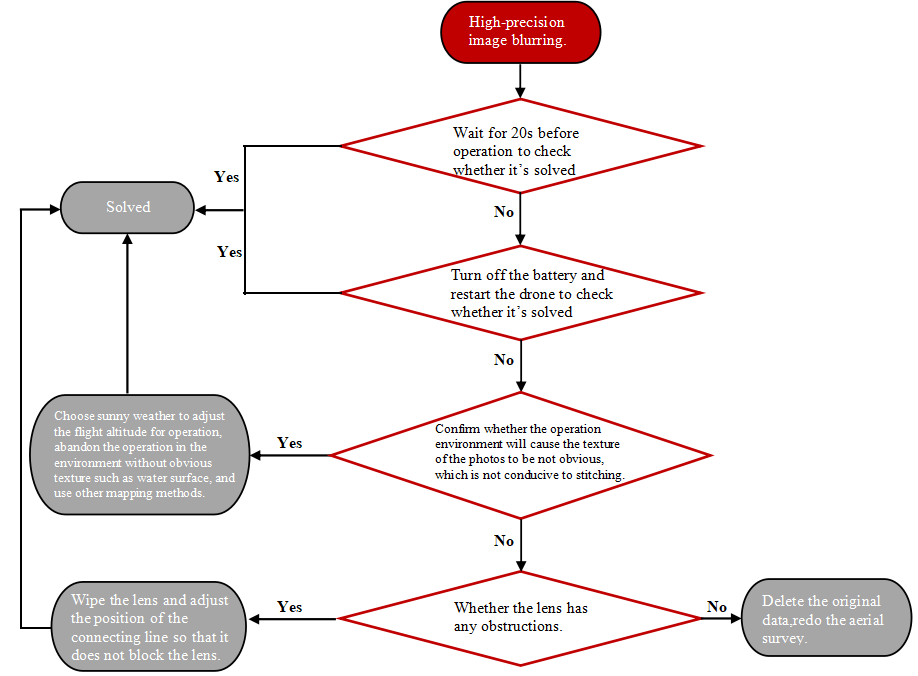
Cause analysis
(1) During the aerial survey of RealTerra, the wind speed is too high, and the vibration of the body is too large, resulting in serious camera shake.
(2) Aerial survey conditions do not meet the operation requirements, such as in dim light, insufficient brightness weather, it will resulting in poor photo quality.
(3) The texture features of the shooting scene are not clear, such as the use of RealTerrain desert, water and other scenes.
(4) The shooting lens is dirty.
Investigation steps and handling methods
(1) Pay attention to the wind speed of the flight environment, avoid the windy weather, check the structural parts of the airframe, and carry out the RealTerra aerial survey task after the wind speed is reduced.
(2) Select the day or the weather with good light brightness to carry out the RealTerra aerial survey, and avoid the cloudy and dim light period.
(3) Ensure that RealTerra is used in scenes with rich texture features, and avoid operations in water, desert and other environments where texture features are not obvious.
(4) Wipe the lens with a clean dust-free cloth to ensure that the camera is clean and free of debris.
(5) Combine the operation conditions above, if the high-precision map display is fuzzy, delete the original data, and completing the aerial survey of the farmland again.
Error "No point cloud link found" when viewing 3D high precision map
Phenomenon description: RealTerra camera completes the task of farmland mapping, opens the "XAG One" App, and views the three-dimensional high-precision map data.An error is reported, and it is displayed as "no point cloud link found" for 3D high-precision map data.
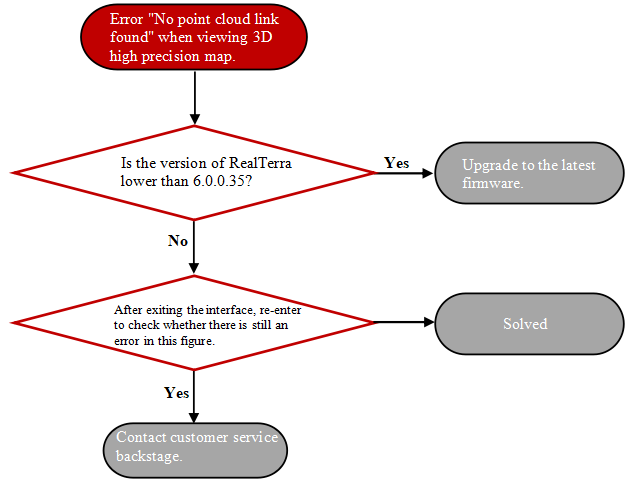
Cause analysis
(1) The platform data has not been processed well, so the App cannot be viewed.
(2) The aerial survey data on the platform is invalid, causing the App to be unable to view.
(3) "XAG One" App has abnormal communication in a short time, resulting in failure to view.
(4) The user's RealTerra version is low and needs to be upgraded.
Investigation steps and handling methods
(1) View the version of RealTerra. If the version is too low (6.0.0.35 and below), it is necessary to upgrade the version of RealTerra (Note: if the problem occurs after the aerial survey of the old version of RealTerra, and upgrade it then again, the problem will still exist and need to be handled manually in the background.The problem will not occur when flying again.)
(2) Exit the current page and wait for a few minutes to view the 3D high-precision map. If there is still no data after repeated, aerial survey shall be conducted again.
(3) If the above steps are completed and the 3D high precision map still cannot be viewed, contact the backstage staff.
3D high precision drawing operation error "tile quantity is empty"
Phenomenon description: conduct 3D route flight, confirm flight parameters and flight mission, and modify flight parameters in midcourse.An error is reported in the 3D route data, and the prompt "The number of tiles is empty" appears.
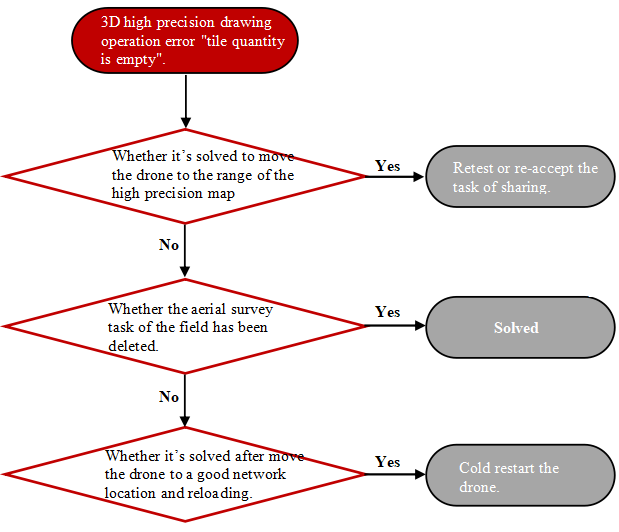
Cause analysis
(1) The take-off point of the agricultural drone is not within the scope of the high-precision map.
(2) The aerial survey task was deleted, resulting in the failure to retrieve data.
(3) The network condition is unstable, resulting in errors when synchronizing data from the cloud.
(4) Abnormal map service exit.
Investigation steps and handling methods
(1) Move the agricultural drone to the high-precision map range.
(2) If App shows that the agricultural drone has been within the scope of the high-precision map, check whether the aerial survey task of the plot has been deleted. Because after the task is deleted, the App will still display high-precision graphics, which will cause interference.
(3) If the aerial survey task of the plot has been deleted, the aerial survey shall be carried out again, or the owner of the high-precision map of the plot shall share it again.
(4) Move that agricultural drone to a place where the network is good and then reload.
(5) Unplug the agricultural drone UPS and restart the power supply.
When the route is uploaded, prompt "the route fails to upload, and the route passes through a hole"
Phenomenon description: When the route is uploaded, "XAG One" App shows that "the route failed to upload (100003), and the route passed through the hole.
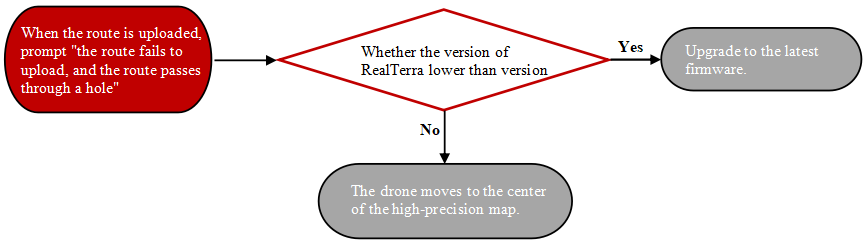
Cause analysis
(1) There are holes in the point cloud data generated by RealTerra itself.
(2) The range of navigation area exceeds the range of high-precision map.
Investigation steps and handling methods
(1) Check the RealTerra firmware version. If it is lower than RealTerra firmware version 85, upgrade and optimize.
(2) Move the agricultural drone and adjust the take-off point (move to the center of the high-precision map).
After the execution of the task, the settlement results are uploaded for too long (or are stuck)
Phenomenon description: After the aerial survey mission, the upload progress of the results task displayed on the "XAG One" App is stuck or uploaded for too long.
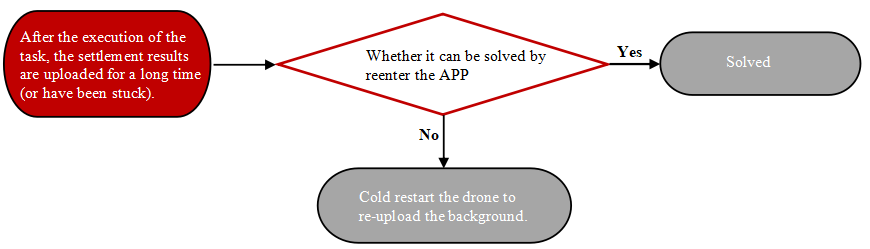
Cause analysis
(1) App can not receive the data pushed by the agricultural drone, resulting in the page has not been updated.
(2) There are network exceptions during the upload process, such as timeout, connection denied, etc.
Investigation steps and handling methods
(1) Go back to App and re-enter, and you should be able to see the results.
(2) If the above operation still fails to restart the agricultural drone, the background will continue to retransmit.
Aerial survey error "No response to camera route mode query"
Phenomenon description: During the aerial survey task, the "XAG One" App software cannot query the current working mode of the camera, and an aerial survey error is reported. It is displayed as "No response from camera route mode query".
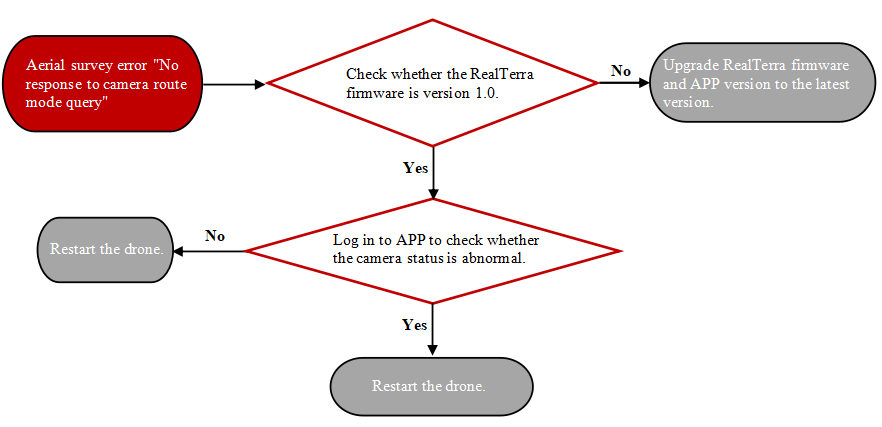
Cause analysis
(1) User RealTerra's firmware version and App version are older (version 1.0).
(2) App cannot find the working mode of the current camera.
Investigation steps and handling methods
(1) Check the device details and observe the firmware version. If it is version 1.0, upgrade the RealTerra firmware and App to the latest version.
(2) After the equipment is updated, log in to the software to check the status of the camera. If the camera is abnormal, it is recommended to shut down and restart the agricultural drone.